Rusiyanın maliyyə sistemi, onun tərkibi və strukturu Maliyyə sisteminə daxil olan maliyyə institutlarının məcmusu
Bütöv bir kateqoriya kimi maliyyə strukturu özünəməxsus ümumi xüsusiyyətləri ilə bir-biri ilə əlaqəli bir neçə əlaqəni əhatə edir ...
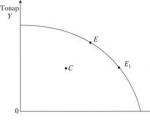
Arabada ters çevrilmiş sarkacın sxematik təsviri. Çubuğun kütləsi yoxdur. Çubuğun ucunda arabanın kütləsini və topun kütləsini işarə edirik M və m. Çubuğun bir uzunluğu var l.
Ters çevrilmiş sarkaç, möhkəm bir çubuğun ucunda sabitlənmiş, dayaq nöqtəsindən yuxarıda bir kütlə mərkəzi olan bir sarkaçdır. Tez-tez dayaq nöqtəsi üfüqi olaraq hərəkət edə bilən bir arabaya sabitlənir. Normal sarkaç davamlı olaraq aşağıya doğru asıldığı halda, tərs sarkaç mahiyyət etibarı ilə qeyri-sabitdir və ya dönmə nöqtəsinə fırlanma anı tətbiq etməklə və ya əks əlaqə sisteminin bir hissəsi kimi dönmə nöqtəsini üfüqi şəkildə hərəkət etdirməklə dik qalmaq üçün daim tarazlaşdırılmalıdır. Ən sadə nümayiş barmağınızın ucunda bir qələmi balanslaşdırmaq olardı.
Ters sarkaç dinamika və idarəetmə nəzəriyyəsində klassik problemdir və idarəetmə alqoritmlərinin (PID nəzarətçiləri, neyron şəbəkələri, qeyri-səlis idarəetmə və s.) sınaqdan keçirilməsi üçün etalon kimi geniş istifadə olunur.
Tərs sarkaç problemi raketin istiqamətləndirilməsi ilə bağlıdır, çünki raketin mühərriki ağırlıq mərkəzindən aşağıda yerləşir və qeyri-sabitliyə səbəb olur. Eyni problem, məsələn, segway-də, özünü balanslaşdıran nəqliyyat qurğusunda həll edilir.
Tərs sarkacın sabitləşdirilməsinin başqa bir yolu, bazanı şaquli müstəvidə sürətlə yelləməkdir. Bu vəziyyətdə, geribildirim olmadan edə bilərsiniz. Əgər salınımlar kifayət qədər güclüdürsə (sürətlənmə və amplituda baxımından), onda tərs sarkaç sabitləşə bilər. Hərəkət edən nöqtə sadə harmonik rəqslərə uyğun olaraq rəqs edirsə, onda sarkacın hərəkəti Matye funksiyası ilə təsvir olunur.
Hərəkət tənliyi düz sarkaça bənzəyir, istisna olmaqla, bucaq mövqeyinin işarəsi qeyri-sabit tarazlığın şaquli mövqeyindən ölçülür:
θ ¨ − g ℓ sin θ = 0 (\displaystyle (\ddot (\theta))-(g \over \ell )\sin \theta =0)Tərcümə edildikdə, bucaq sürətlənməsinin eyni işarəsinə sahib olacaq:
θ ¨ = g ℓ sin θ (\displaystyle (\ddot (\theta))=(g \over \ell )\sin \theta )Beləliklə, əks sarkaç şaquli qeyri-sabit tarazlıqdan əks istiqamətdə sürətlənəcək və sürətlənmə uzunluğa tərs mütənasib olacaqdır. Hündür sarkaç qısadan daha yavaş düşür.
Hərəkət tənliklərini Laqranj tənliklərindən istifadə etməklə çıxarmaq olar. Bu yuxarıdakı rəqəmdir, harada θ (t) (\displaystyle \theta (t)) sarkaç bucağının uzunluğu l (\displaystyle l)şaquli və təsir edən cazibə qüvvəsi və xarici qüvvələrə münasibətdə F (\displaystyle F) istiqamətində x (\displaystyle x). müəyyən edək x (t) (\displaystyle x(t)) araba mövqeyi. Laqrangian L = T − V (\displaystyle L=T-V) sistemlər:
L = 1 2 M v 1 2 + 1 2 mv 2 2 − mg ℓ cos θ (\displaystyle L=(\frac (1)(2))Mv_(1)^(2)+(\frac (1) (2))mv_(2)^(2)-mg\ell \cos \theta )arabanın sürəti haradadır və maddi nöqtənin sürətidir m (\displaystyle m). v 1 (\displaystyle v_(1)) və v 2 (\displaystyle v_(2)) vasitəsilə ifadə etmək olar x (\displaystyle x) və θ (\displaystyle \teta) mövqeyin birinci törəməsi kimi sürəti yazmaqla.
v 1 2 = x ˙ 2 (\displaystyle v_(1)^(2)=(\nöqtə (x))^(2)) v 2 2 = (ddt (x − ℓ sin θ)) 2 + (ddt (ℓ cos θ)) 2 (\displaystyle v_(2)^(2)=\left((\frac (d)(dt) ))(\left(x-\ell \sin \theta \sağ))\right)^(2)+\left((\frac (d)(dt))(\left(\ell \cos \theta \) sağ)))\sağ)^(2))İfadə sadələşdirilməsi v 2 (\displaystyle v_(2)) aparır, səbəb olur:
v 2 2 = x ˙ 2 − 2 ℓ x ˙ θ ˙ cos θ + ℓ 2 θ ˙ 2 (\displaystyle v_(2)^(2)=(\nöqtə (x))^(2)-2\ell (\nöqtə (x))(\nöqtə (\teta))\cos \theta +\ell ^(2)(\nöqtə (\teta))^(2))Laqrangian indi düsturla müəyyən edilir:
L = 1 2 (M + m) x ˙ 2 − m ℓ x ˙ θ ˙ cos θ + 1 2 m ℓ 2 θ ˙ 2 − mg ℓ cos θ (\displaystyle L=(\frac (1)(2) ))\sol(M+m\sağ)(\nöqtə (x))^(2)-m\ell (\nöqtə (x))(\nöqtə (\teta))\cos \theta +(\frac () 1)(2))m\ell ^(2)(\nöqtə (\teta))^(2)-mg\ell \cos \theta )və hərəkət tənlikləri:
ddt ∂ L ∂ x ˙ − ∂ L ∂ x = F (\displaystyle (\frac (\mathrm (d) )(\mathrm (d) t))(\qismən (L) \qismən (\nöqtə (x) üzərində) )))-(\qismən (L) \üzerində \qismən x)=F) ddt ∂ L ∂ θ ˙ − ∂ L ∂ θ = 0 (\displaystyle (\frac (\mathrm (d) )(\mathrm (d) t))(\qismən (L) \qismən (\nöqtə (\) teta)))-(\qismən (L) \üzerində \qismən \teta )=0)Əvəzetmə L (\displaystyle L) sonradan sadələşdirmə ilə bu ifadələrə çevrilərək tərs sarkacın hərəkətini təsvir edən tənliklərə gətirib çıxarır:
(M + m) x ¨ − m ℓ θ ¨ cos θ + m ℓ θ ˙ 2 sin θ = F (\displaystyle \left(M+m\sağ)(\ddot (x))-m\ell ( \ddot (\theta))\cos \theta +m\ell (\nöqtə (\teta))^(2)\sin \theta =F) ℓ θ ¨ − g sin θ = x ¨ cos θ (\displaystyle \ell (\ddot (\theta))-g\sin \theta =(\ddot (x))\cos \theta )Bu tənliklər qeyri-xəttidir, lakin idarəetmə sisteminin məqsədi sarkacın şaquli saxlanılması olduğundan, tənliklər aşağıdakıları götürərək xəttiləşdirilə bilər. θ ≈ 0 (\displaystyle \theta \təxminən 0).
Belə sarkaç üçün hərəkət tənliyi kütləsiz salınan baza ilə əlaqədardır və arabada olan sarkaçla eyni şəkildə alınır. Maddi nöqtənin mövqeyi düsturla müəyyən edilir:
(− ℓ sin θ , y + ℓ cos θ) (\displaystyle \left(-\ell \sin \theta ,y+\ell \cos \theta \sağ))və sürət mövqeyin birinci törəməsi vasitəsilə tapılır:
v 2 = y ˙ 2 − 2 ℓ y ˙ θ ˙ sin θ + ℓ 2 θ ˙ 2 . (\ displaystyle v ^ (2) = (\ nöqtə (y)) ^ (2) - 2 \ ell (\ nöqtə (y)) (\ nöqtə (\ teta)) \ sin \ teta + \ ell ^ (2)) (\nöqtə (\teta))^(2).)Bu sistem üçün Laqranjianı belə yazmaq olar:
L = 1 2 m (y ˙ 2 − 2 ℓ y ˙ θ ˙ sin θ + ℓ 2 θ ˙ 2) − mg (y + ℓ cos θ) (\displaystyle L=(\frac (1)(2) )m\left((\nöqtə (y))^(2)-2\ell (\nöqtə (y))(\nöqtə (\teta))\sin \theta +\ell ^(2)(\nöqtə ( \theta))^(2)\right)-mg\left(y+\ell \cos \theta \right))hərəkət tənlikləri aşağıdakılardan əmələ gəlir:
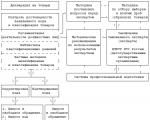
ddt ∂ L ∂ θ ˙ − ∂ L ∂ θ = 0 (\displaystyle (\mathrm (d) \over \mathrm (d) t)(\qismən (L) \qismən (\nöqtə (\teta)) -(\qismən (L) \üzerində \qismən \teta )=0) 1İş idarəetmə nəzəriyyəsində böyük diqqət yetirilən tərs sarkacın sabitləşməsi probleminə həsr edilmişdir, çünki antropomorfik texniki cihazların şaquli vəziyyətini saxlamaq üçün alqoritmlər bu qeyri-sabit sistemin timsalında qurulmuşdur. Bu məqalə tərs sarkacın şaquli qeyri-sabit vəziyyətə gətirilməsi strategiyasını təsvir edir, Festo-dan TR-802 laboratoriya stendi və yerdəyişməni idarə edən cihazdan ibarət olan tərs sarkacın sabitləşdirilməsi üçün opto-mexaniki sistem işləyib hazırlayıb. Göstərilir ki, sarkaç ən yuxarı vəziyyətə gətirildikdən sonra sabitləşdirmə sistemi sarkacın bucağından asılı olaraq vaqonu müəyyən sayda addımlarla hərəkət etdirərək sarkacın bu vəziyyətdə saxlanılmasını təmin edir. Sarkacın qeyri-sabit tarazlıq vəziyyətinə gətirilməsi və sonradan bu vəziyyətdə saxlanması üçün alqoritmlər, həmçinin müvafiq proqram təminatı işlənib hazırlanmışdır.
tərs sarkaç
tarazlıq
sabitləşmə
Əlaqə
alqoritm
fotoemitter
mikroprosessor
proqram təminatı
1. Kapitsa P.L. Bir salınan asma nöqtəsi olan sarkacın dinamik sabitliyi // ZhETF. - 1951. - No 21. – S.588–597.
2. Kapitsa P.L. Titrəmə asma ilə sarkaç // UFN. - 1951. - No 44. – S.7–20.
3. Kuznetsov V.P., İvanov A.A., Kudryashov B.P. Fiber optik çeviricilər əsasında texnoloji obyektlərin parametrlərinin ölçülməsi üçün vasitələrin layihələndirilməsi: Tədris kitabçası. - Kurqan: Kurqan Dövlətinin Nəşriyyatı. un-ta, 2013. - 84 s.
4. Makarov A.V., Kuzyakov O.N. Hərəkətə nəzarət cihazı// Rusiya Patenti No 2150086. - 2000. - Bul. № 15.
5. Formalski A.M. Sabit və ya daşınan bir asma nöqtəsi olan tərs sarkacın sabitləşdirilməsi // Dokl. - 2006. - cild 406, No 2. – S.175–179.
6. Ashish S. Katariya Təkərli tərs sarkaç sistemi üçün optimal vəziyyət-geri əlaqə və çıxış-geri əlaqə nəzarətçiləri; Corciya Texnologiya İnstitutu, 2010. - 72 s.
7. Bradshaw A., Shao J. Ters sarkaç sistemlərinin yelləncək nəzarəti // Robotica. - 1996. - Cild. 14. - R. 397-405.
8. Bugeja M. Ters sarkaç sisteminin qeyri-xətti yelləncək və sabitləşdirici nəzarəti, Proc. of. EUROCON, Lyublyana. – 2003.
9.Mövqeləşdirmə sistemi. Ağıllı Yerləşdirmə Nəzarətçisi SPC200. təlimat. Festo AG & Co. KG, Departament. KI-TD. - 2005. - 371 s.
10. SPC200 Smart Positioning Controller. WinPISA proqram paketi. Festo AG & Co. Kiloqram. - 2005. - 381 s.
Sarkaç tipli obyektlərin idarə edilməsi problemi bir sıra elm sahələri üçün əsasdır, çünki onun həlli avtomatik idarəetmə, robototexnika nəzəriyyəsində öz əksini tapır və təyyarələrin modelləşdirilməsində, hərəkət edən cisimlərin mövqeyinin sabitləşdirilməsi problemlərinin həllində istifadə olunur. platforma, xüsusi nəqliyyat vasitələrinin hazırlanmasında - segways və s.
Fiziki sarkaç ən sadə və ən çox yayılmış fiziki modellərdən biridir, uzanmayan ip və ya sərt çubuq üzərində salınan yükdür. Belə bir sistemin xüsusi halı iki tarazlıq mövqeyinə malik qeyri-sabit fiziki obyekt olan tərs sarkaçdır: aşağı və yuxarı nöqtələrdə. Bu vəziyyətdə, hər hansı bir ixtiyari kiçik təlaş, sonrakı tarazlıq mövqeyinə keçmək istəyi ilə sarkacını yuxarı tarazlıq mövqeyindən çıxara bilir. Sarkacı yuxarı nöqtədə sabitləşdirmək üçün sistem geribildirim təmin edən müxtəlif elementlərlə əlavə edilə bilər - idarəetmə sisteminin zəruri komponenti.
Əsərlər ters çevrilmiş sarkaç üçün yuxarı vəziyyəti sabitləşdirmək probleminin həllinə həsr edilmişdir. Sistem modeli aşağıdakı tənliklə ifadə edilir:
burada m sarkacın kütləsidir; l - sarkaç asma uzunluğu; J - sarkacın ətalət momentidir; θ - sarkacın şaquli tərəfdən meyl bucağı; a - sarkacın (vaqonun) asma nöqtəsinin hərəkətinin sürətləndirilməsi; g sərbəst düşmə sürətidir. Transformasiyalardan sonra alırıq
Nəticə etibarı ilə sistemin hərəkətinə aşağıdakı parametrlər təsir edir: sarkaç asmasının kütləsi və uzunluğu və onun asma nöqtəsinin sürətlənməsi - vaqon.
Sistemin təsviri
Bu işdə sarkacın həddindən artıq yuxarı mövqeyinin təyinedicisi kimi Festo (Almaniya) şirkətinin TP-802 laboratoriya stendindən istifadə edərək bu mövqenin sonradan sabitləşdirilməsi ilə sarkacın həddindən artıq yuxarı vəziyyətə gətirilməsi prosesini simulyasiya etmək vəzifəsi qoyulmuşdur. , eləcə də yaradılmış sabitləşdirmə sistemi üçün istifadə olunan digər komponentlər.
1. Sarkacın yuxarı tarazlıq vəziyyətinə gətirilməsi strategiyası
Aydındır ki, sarkacın həddindən artıq yuxarı tarazlıq vəziyyətinə gətirilməsi imkanları Festo laboratoriya stendi TP-nin parametrləri (xüsusən də sürücünün uzunluğu və vaqonun hərəkətinin sürətləndirilməsinin mümkün olan maksimum dəyəri) ilə məhdudlaşır. 802, bunun əsasında vəzifə həll edilir. Deməli, vaqonun hərəkətinin maksimal sürəti a=4m/s2-dir.
Riyazi hesablamalar yolu ilə müəyyən edilmişdir ki, vaqon tərəfindən onun hərəkət istiqamətində tələb olunan dəyişmə miqdarını təyin edən sarkacın sürətləndirilməsinin həddi qiyməti a0=13,1m/s2-dir. Festo TP-802 laboratoriya stendindən istifadə edərkən, bu dəyər vaqon sürətləndirilməsinin mümkün olan maksimum dəyərindən çox yüksək olduğundan, bu işdə vaqonun hərəkət istiqamətinin dəyişdiyi tərs sarkacın çıxarılması üçün belə bir strategiyadan istifadə etdik. dəfələrlə və vaqonun cari vəziyyətdən yerdəyişməsi artır.
2. Sarkacın həddindən artıq yuxarı mövqeyə çəkilməsinin riyazi təsviri
Məlumdur ki, sarkacın yuxarı tarazlıq vəziyyətinə gəlməsi üçün onun potensial enerjisi Ep=2mpgl qiymətinə çatmalıdır, burada mp sarkacın kütləsidir; l - sarkacın uzunluğu; g sərbəst düşmə sürətidir. Bu nəzərə alır ki, mp=0,06kg, l=0,25m, g=10m/s2. Beləliklə, məsələni həll etmək üçün sarkacın potensial enerjisi Ep=0,3J-ə bərabər olmalıdır.
Sarkacın yellənməsinin aşağıdakı kimi həyata keçirilməsi qərara alındı: elektromexaniki sürücü vaqonu ilkin vəziyyətinə nisbətən sabit sayda addımlarla, əvvəlcə mənfi istiqamətə, sonra müsbət istiqamətə dəyişdirir. Vaqon hər iki istiqamətdə hərəkət etdikdə əsas mövqedən ofsetin miqdarı artır. Sarkacın həddindən artıq yuxarı tarazlıq vəziyyətinə gətirilməsi üçün Şəkil 1-də göstərilən alqoritm hazırlanmışdır. Bu halda fərz edilir: (1) vaqon X=0mm və X=300mm nöqtələri arasında Ox oxu boyunca hərəkət edir; (2) ilkin mövqe vaqonlar - koordinat X=150mm; (3) N - vaqonun ilkin mövqedən yerdəyişməsinin qiyməti (mm ilə), (4) K vaqonun bu mövqedən yerdəyişməsinin müəyyən edilmiş artımıdır (mm ilə).
Nəzərə alsaq ki, ona sarkaç bağlanmış vaqon üfüqi ox boyunca hərəkət etdikdə, vaqon hərəkətinin kinetik enerjisi Ek, sarkaç hərəkətinin potensial enerjisinə çevrilir Ep, enerjisinin artımını hesablamaq olar. sarkaç. Fərz edək ki, vaqonun ilkin vəziyyətdən yerdəyişmə miqdarı N=50mm-ə bərabərdir, vaqonun başlanğıc vəziyyətdən yerdəyişməsinin göstərilən artımının qiyməti K=50mm-dir. Sonra vaqonun ilk yerdəyişməsindən sonra sarkacın potensial enerjisinin qiyməti
ikincidən sonra
![]()
Beləliklə, üç vaqon hərəkətindən sonra sarkacın potensial enerjisi onu yuxarı tarazlıq vəziyyətinə gətirmək üçün tələb olunan dəyəri aşmalıdır.
3. Sarkacın həddindən artıq yuxarı vəziyyətə gətirilməsi alqoritmi
Praktikada məlum oldu ki, vaqonun kinetik enerjisinin sarkacın potensial enerjisinə çevrilməsi nəzərə alınmaqla əvvəlki bənddə çıxarılan nəticələr eksperimental məlumatlara uyğun gəlmir. Enerjinin çox hissəsi içəridə sərf olunur mühit konstruksiyanın qüsursuzluğu, vaqonun sürtünməsi və sarkacın asılması səbəbindən.
Beləliklə, fiziki nəzarət obyekti, MTR-ST pilləli mühərriki ilə idarə olunan və SPC- vasitəsilə PC kompüteri tərəfindən idarə olunan elektromexaniki sürücü arabasının sonlu sayda hərəkəti üçün ən yüksək qeyri-sabit vəziyyətə gətirilən tərs sarkaçdır. 200 koordinat yerləşdirmə nəzarətçisi. Əks sarkacın mövqeyini sabitləşdirmək üçün sistemin başlanğıcı sarkacın həddindən artıq yuxarı mövqeyinə çəkilməsini izləyir. Bu problemi həll etmək üçün Şəkil 1-də təqdim olunan alqoritm və vaqonun yerləşdirilməsi üçün müvafiq tətbiq proqramı işlənib hazırlanmışdır. Bu halda qəbul edilir ki, N vaqonun ötürmə oxunun mərkəzindən yerdəyişməsi, K isə vaqonun hərəkət oxunun mərkəzindən yerdəyişməsində göstərilən artımdır.

düyü. 1. Sarkacın yuxarı vəziyyətə gətirilməsi üçün alt proqramın alqoritmi
Festo WinPisa 4.41 proqram təminatından istifadə edərək "vaqon - sarkaç" sistemində təcrübə zamanı hazırlanmış sarkacın ən yüksək mövqeyə gətirilməsi proqramının siyahısı aşağıda təqdim olunur. Proqram kodunun izahı ilə şərhlər ";" işarəsindən sonra müvafiq sətirlərin əksinə verilir.

Proqramın başlanğıcında vaqon sürücü oxunun mərkəzinə doğru hərəkət edir. Proqramın növbəti 9 sətri sarkacın artan salınımlarına uyğun gəlir, bundan sonra vaqon yuxarı nöqtədə sarkacın müvəqqəti sabitləşməsi üçün daha 2 hərəkət edir.
Birbaşa sarkaç yuxarı tarazlıq vəziyyətinə çatdıqda, "vaqon - sarkaç" sisteminin hərəkətə nəzarəti hazırlanmış sabitləşdirmə sisteminə keçir.
4. Stabilizasiya sisteminin işləməsi
Bu sistemin mühüm komponentlərindən biri də təsvir edilən hərəkətə nəzarət üçün optik cihazdır. Sistemin strukturu Şəkil 2-də göstərilmişdir.
Sabit əsasda 1 X oxu boyunca hərəkət edən vaqon 3 var ki, onun üzərində sarkaç 7 emitent 9 olan yüklə 8 sabitlənir. Karetka xətti elektromexaniki ötürücü2 vasitəsi ilə pilləli mühərrikə4 möhkəm bağlanır. Step motor4 mövqe tənzimləyicisi6 tərəfindən motor tənzimləyicisi5 vasitəsilə idarə olunur. Kompüter14 emitentin9 və dekoderin13 işinə nəzarət edir, onların girişləri cərəyan qiymətinə çevirmək üçün qurğu olan 10, 11, 12 fotodetektorlardan siqnalları qəbul edir və onların çıxışları kompüterə14 qoşulur. Bu halda, fotodetektor 10 mərkəzidir və yalnız əks sarkaç şaquli vəziyyətdə olduqda (yuxarı nöqtə) çıxışında siqnal yaradır.
Sistem aşağıdakı kimi işləyir: sarkaç7 pilləli mühərrik5 tərəfindən idarə olunan elektromexaniki sürücünün vaqonunun sonlu sayda hərəkəti üçün həddindən artıq yuxarı qeyri-sabit tarazlıq vəziyyətinə gətirilir və vaqonun maksimum hərəkət məsafəsi 300 mm-dir. Sarkacın8 çəkisi üzərində sabitlənmiş işıq emitenti9 sarkaç7 yuxarıya doğru hərəkət etməyə başladığı andan işə salınır və sarkacın7 şaquli vəziyyəti anında fotodetektorda10 siqnal deşifrə vasitəsi ilə kompüterə 14 daxil olur. 13 və sarkacın həddindən artıq yuxarı mövqeyinə uyğun gələn proqramlı şəkildə sabitlənmişdir. Fiziki qüvvələrin təsiri altında olan sarkaç uzun müddət bu vəziyyətdə qala bilməz və kənara çıxmağa başlayır. Sarkaç şaquli istiqamətdən kənara çıxdıqda, fotoemitterin işıq istiqaməti dəyişir, bu da fotodetektorlar tərəfindən qeydə alınır. Fotodetektor10-a ən yaxın olan hansı fotodetektorun ilk olaraq emitent siqnalını (Lk və ya Pk) qeyd etdiyinə əsaslanaraq, sarkacın koordinatlarını (sarkacın şaqulidən yayınma bucağı) və sapma istiqamətini təyin etmək olar. Fotodetektorların sayı və onların dəyişdirilməsi addımı birbaşa tələb olunan ölçmə dəqiqliyindən asılıdır.
Fiziki qüvvələrin təsiri altında olan sarkaç uzun müddət bu vəziyyətdə qala bilməz və kənara çıxmağa başlayır. Sarkaç şaquli istiqamətdən kənara çıxdıqda, fotoemitterin işıq istiqaməti dəyişir, bu da fotodetektorlar tərəfindən qeydə alınır. Fotodetektor 10-a nisbətən hansı ən yaxın fotodetektorun ilk olaraq emitent siqnalını (Lk və ya Pk) qeyd etdiyinə görə, sarkacın koordinatlarını (sarkacın şaqulidən sapma bucağı) və istiqamətini təyin etmək mümkündür. sapma. Fotodetektorların sayı və onların dəyişdirilməsi addımı birbaşa tələb olunan ölçmə dəqiqliyindən asılıdır. Sarkacın7 mövqeyi haqqında məlumat fotodetektorlardan kompüterə14 gəlir, verilmiş proqrama uyğun işlənir, bunun əsasında mövqe nəzarətçisi 6 üçün idarəetmə hərəkəti formalaşır: vaqonu müəyyən sayda sarkaç sapmasına doğru hərəkət etdirin. sarkacın şaquli istiqamətdən sapmasından asılı olaraq addımların sayı. Beləliklə, bu sistem qapalıdır və tərs sarkacın şaquli vəziyyətdə sabitləşməsinə imkan verir. Sistemin işinin alqoritmi Fig.3-də göstərilmişdir.

düyü. 2. Sistem strukturu

düyü. 3. Sistemin əməliyyat alqoritmi
Nəticə
Beləliklə, bu işdə sarkacın sonradan şaquli (qeyri-sabit) tarazlıq vəziyyətində saxlanması ilə həddindən artıq yuxarı tarazlıq vəziyyətinə gətirilməsi üçün alqoritmlər hazırlanmışdır. Sarkacın dizaynının qeyri-kamilliyi sarkacın yuxarı nöqtəyə gətirilməsi üçün daha çox sayda vaqon hərəkətlərinin yerinə yetirilməsinə səbəb oldu. Həmçinin, Festo-dan TR-802 laboratoriya elektro-mexaniki stendindən və optik yerdəyişmə idarəetmə qurğusundan ibarət tərs sarkacın yuxarı nöqtədə mövqeyini sabitləşdirmək üçün opto-mexaniki sistemin qurulması prinsipləri hazırlanmışdır. Tövsiyələr kimi, üç koordinat boyunca idarə olunan skan edən elementləri hərəkət etdirərkən, texnoloji obyektlər üçün monitorinq sistemlərinin inkişafı üçün əldə edilən nəticələrdən istifadə etmək təklif olunur.
Ters çevrilmiş sarkaç, möhkəm bir çubuğun ucunda sabitlənmiş, dayaq nöqtəsindən yuxarıda bir kütlə mərkəzi olan bir sarkaçdır. Tez-tez dayaq nöqtəsi üfüqi olaraq hərəkət edə bilən bir arabaya sabitlənir. Normal sarkaç davamlı olaraq aşağıya doğru asıldığı halda, tərs sarkaç mahiyyət etibarı ilə qeyri-sabitdir və ya dönmə nöqtəsinə fırlanma anı tətbiq etməklə və ya əks əlaqə sisteminin bir hissəsi kimi dönmə nöqtəsini üfüqi şəkildə hərəkət etdirməklə dik qalmaq üçün daim tarazlaşdırılmalıdır. Ən sadə nümayiş barmağınızın ucunda bir qələmi balanslaşdırmaq olardı.
Ters sarkaç dinamika və idarəetmə nəzəriyyəsində klassik problemdir və idarəetmə alqoritmlərinin (PID nəzarətçiləri, neyron şəbəkələri, qeyri-səlis idarəetmə və s.) sınaqdan keçirilməsi üçün etalon kimi geniş istifadə olunur.
Tərs sarkaç problemi raketin istiqamətləndirilməsi ilə bağlıdır, çünki raketin mühərriki ağırlıq mərkəzindən aşağıda yerləşir və qeyri-sabitliyə səbəb olur. Eyni problem, məsələn, segway-də, özünü balanslaşdıran nəqliyyat qurğusunda həll edilir.
Tərs sarkacın sabitləşdirilməsinin başqa bir yolu, bazanı şaquli müstəvidə sürətlə yelləməkdir. Bu vəziyyətdə, geribildirim olmadan edə bilərsiniz. Əgər salınımlar kifayət qədər güclüdürsə (sürətlənmə və amplituda baxımından), onda tərs sarkaç sabitləşə bilər. Hərəkət edən nöqtə sadə harmonik rəqslərə uyğun olaraq rəqs edirsə, onda sarkacın hərəkəti Matye funksiyası ilə təsvir olunur.
Hərəkət tənliyi düz sarkaça bənzəyir, istisna olmaqla, bucaq mövqeyinin işarəsi qeyri-sabit tarazlığın şaquli mövqeyindən ölçülür:
texvc tapılmadı; Quraşdırma yardımı üçün riyaziyyat/README-ə baxın.): \ddot \theta - (g \over \ell) \sin \theta = 0
Tərcümə edildikdə, bucaq sürətlənməsinin eyni işarəsinə sahib olacaq:
İfadəni təhlil etmək mümkün deyil (icra olunan fayltexvc tapılmadı; Quraşdırma yardımı üçün riyaziyyat/README-ə baxın.): \ddot \theta = (g \over \ell) \sin \theta
Beləliklə, əks sarkaç şaquli qeyri-sabit tarazlıqdan əks istiqamətdə sürətlənəcək və sürətlənmə uzunluğa tərs mütənasib olacaqdır. Hündür sarkaç qısadan daha yavaş düşür.
Hərəkət tənliklərini Laqranj tənliklərindən istifadə etməklə çıxarmaq olar. Bu yuxarıdakı rəqəmdir, harada İfadəni təhlil etmək mümkün deyil (icra olunan fayl texvc tapılmadı; Quraşdırma yardımı üçün riyaziyyat/README-ə baxın.): \theta(t) sarkaç bucağının uzunluğu İfadəni təhlil etmək mümkün deyil (icra olunan fayl texvc tapılmadı; Quraşdırma yardımı üçün riyaziyyat/README-ə baxın.): lşaquli və təsir edən cazibə qüvvəsi və xarici qüvvələrin təsiri ilə İfadəni təhlil etmək mümkün deyil (icra olunan fayl texvc tapılmadı; Quraşdırma yardımı üçün riyaziyyat/README-ə baxın.): F istiqamətində İfadəni təhlil etmək mümkün deyil (icra olunan fayl texvc . müəyyən edək İfadəni təhlil etmək mümkün deyil (icra olunan fayl texvc tapılmadı; Quraşdırma yardımı üçün riyaziyyat/README-ə baxın.: x(t) araba mövqeyi. Laqrangian İfadəni təhlil etmək mümkün deyil (icra olunan fayl texvc tapılmadı; Quraşdırma yardımı üçün riyaziyyat/README-ə baxın.): L = T - V sistemlər:
texvc tapılmadı; Sazlama yardımı üçün riyaziyyat/README-ə baxın.: L = \frac(1)(2) M v_1^2 + \frac(1)(2) m v_2^2 - m g \ell\cos\theta
harada İfadəni təhlil etmək mümkün deyil (icra olunan fayl texvc arabanın sürətidir və İfadəni təhlil etmək mümkün deyil (icra olunan fayl texvc - material nöqtəsinin sürəti İfadəni təhlil etmək mümkün deyil (icra olunan fayl texvc tapılmadı; Quraşdırma yardımı üçün riyaziyyat/README-ə baxın.): m
.
İfadəni təhlil etmək mümkün deyil (icra olunan fayl texvc tapılmadı; Quraşdırma yardımı üçün riyaziyyat/README-ə baxın.): v_1 və İfadəni təhlil etmək mümkün deyil (icra olunan fayl texvc tapılmadı; Quraşdırma yardımı üçün riyaziyyat/README-ə baxın.): v_2 vasitəsilə ifadə etmək olar İfadəni təhlil etmək mümkün deyil (icra olunan fayl texvc tapılmadı; Quraşdırma yardımı üçün riyaziyyat/README-ə baxın.): x və İfadəni təhlil etmək mümkün deyil (icra olunan fayl texvc tapılmadı; Quraşdırma yardımı üçün riyaziyyat/README-ə baxın.): \theta mövqeyin birinci törəməsi kimi sürəti yazmaqla.
texvc tapılmadı; Quraşdırma yardımı üçün riyaziyyat/README-ə baxın.): v_1^2=\nöqtə x^2
İfadəni təhlil etmək mümkün deyil (icra olunan fayl texvc tapılmadı; Quraşdırma yardımı üçün riyaziyyat/README-ə baxın.): v_2^2=\left((\frac(d)(dt))(\left(x- \ell\sin\theta\sağ))\sağ)^2 + \ sol((\frac(d)(dt))(\sol(\ell\cos\theta \sağ))\sağ)^2
İfadə sadələşdirilməsi İfadəni təhlil etmək mümkün deyil (icra olunan fayl texvc tapılmadı; Quraşdırma yardımı üçün riyaziyyat/README-ə baxın.): v_2 aparır, səbəb olur:
texvc tapılmadı; Quraşdırma yardımı üçün riyaziyyat/README-ə baxın.): v_2^2= \nöqtə x^2 -2 \ell \dot x \dot \theta\cos \theta + \ell^2\dot \theta^2
Laqrangian indi düsturla müəyyən edilir:
İfadəni təhlil etmək mümkün deyil (icra olunan fayltexvc tapılmadı; Quraşdırma yardımı üçün riyaziyyat/README-ə baxın.: L = \frac(1)(2) \left(M+m \sağ) \nöqtə x^2 -m \ell \nöqtə x \nöqtə\theta\cos\ teta + \frac(1)(2) m \ell^2 \nöqtə \theta^2-mg \ell\cos \theta
və hərəkət tənlikləri:
İfadəni təhlil etmək mümkün deyil (icra olunan fayltexvc tapılmadı; Quraşdırma yardımı üçün riyaziyyat/README-ə baxın.): \frac(\mathrm(d))(\mathrm(d)t)(\qismən(L)\qismən(\nöqtə x)) - (\qismən( L) \over \qismən x) = F
İfadəni təhlil etmək mümkün deyil (icra olunan fayl texvc tapılmadı; Quraşdırma yardımı üçün riyaziyyat/README-ə baxın.): \frac(\mathrm(d))(\mathrm(d)t)(\qismən(L)\qismən(\nöqtə \teta)) - (\qismən (L) )\over\qismən\teta) = 0
Əvəzetmə İfadəni təhlil etmək mümkün deyil (icra olunan fayl texvc tapılmadı; Quraşdırma yardımı üçün riyaziyyat/README-ə baxın.): L sonradan sadələşdirmə ilə bu ifadələrə çevrilərək tərs sarkacın hərəkətini təsvir edən tənliklərə gətirib çıxarır:
texvc tapılmadı; Quraşdırma yardımı üçün riyaziyyat/README-ə baxın.): \left (M + m \right) \ddot x - m \ell \ddot \theta \cos \theta + m \ell \dot \theta^2 \sin \theta = F
İfadəni təhlil etmək mümkün deyil (icra olunan fayl texvc tapılmadı; Quraşdırma yardımı üçün riyaziyyat/README-ə baxın.): \ell \ddot \theta - g \sin \theta = \ddot x \cos \theta
Bu tənliklər qeyri-xəttidir, lakin idarəetmə sisteminin məqsədi sarkacın şaquli saxlanılması olduğundan, tənliklər aşağıdakıları götürərək xəttiləşdirilə bilər. İfadəni təhlil etmək mümkün deyil (icra olunan fayl texvc tapılmadı; Quraşdırma yardımı üçün riyaziyyat/README-ə baxın.): \theta \təxminən 0
.
Belə sarkaç üçün hərəkət tənliyi kütləsiz salınan baza ilə əlaqədardır və arabada olan sarkaçla eyni şəkildə alınır. Maddi nöqtənin mövqeyi düsturla müəyyən edilir:
İfadəni təhlil etmək mümkün deyil (icra olunan fayltexvc tapılmadı; Quraşdırma yardımı üçün riyaziyyat/README-ə baxın.): \left(-\ell \sin \theta , y + \ell \cos \theta \right)
və sürət mövqeyin birinci törəməsi vasitəsilə tapılır:
İfadəni təhlil etmək mümkün deyil (icra olunan fayltexvc tapılmadı; Quraşdırma yardımı üçün riyaziyyat/README-ə baxın.): v^2=\dot y^2-2 \ell \dot y \dot \theta \sin \theta + \ell^2\dot \theta ^2.
İfadəni təhlil etmək mümkün deyil (icra olunan fayl texvc tapılmadı; Quraşdırma yardımı üçün riyaziyyat/README-ə baxın.): \ddot \theta - (g \over \ell) \sin \theta = -(A \over \ell) \omega^2 \sin \omega t \sin \theta .
Bu tənliyin qapalı formada elementar həlli yoxdur, lakin bir çox istiqamətlərdə öyrənilə bilər. O, Matye tənliyinə yaxındır, məsələn, salınım amplitudası kiçik olduqda. Təhlil göstərir ki, sarkaç sürətlə yellənərkən dik qalır. Birinci qrafik yavaş-yavaş salınan olduğunu göstərir İfadəni təhlil etmək mümkün deyil (icra olunan fayl texvc , sarkaç sabit şaquli mövqedən çıxdıqdan sonra sürətlə aşağı düşür.
Əgər İfadəni təhlil etmək mümkün deyil (icra olunan fayl texvc tapılmadı; Quraşdırma yardımı üçün riyaziyyat/README-ə baxın.): y sürətlə salınır, sarkaç şaquli mövqe ətrafında sabit ola bilər. İkinci qrafik göstərir ki, sabit şaquli mövqedən çıxdıqdan sonra sarkaç indi şaquli mövqe ətrafında fırlanmağa başlayır ( İfadəni təhlil etmək mümkün deyil (icra olunan fayl texvc tapılmadı; Quraşdırma yardımı üçün riyaziyyat/README-ə baxın.): \theta = 0) Şaquli mövqedən kənarlaşma kiçik qalır və sarkaç düşmür.
Buna misal olaraq akrobatika və ya tək velosiped sürmə kimi insanların və obyektlərin balanslaşdırılmasını göstərmək olar. Həm də segway - iki təkərli elektrik özünü balanslaşdıran skuter.
Ters çevrilmiş sarkaç bir neçə erkən seysmoqrafın inkişafında mərkəzi komponent idi.
Alexandra (Aleksis) Obolenskaya Vasili və Anna Seryogin
İnsan ancaq öz ölümünə getdiyi kimi, belə bir seçim etmək üçün özündə güc tapmaq və getdiyi yerə öz istəyi ilə getmək üçün yəqin ki, əsl DOST olmaq lazım idi. Və bu "ölüm", təəssüf ki, o zaman Sibir adlanırdı ...
Çox məğrur, lakin bolşevik çəkmələri tərəfindən o qədər amansızcasına tapdalanan gözəl Sibirimiz üçün həmişə çox kədərləndim və incidim! udulmuş torpaq... Bir vaxtlar dədə-baba yurdumuzun ürəyi olduğuna görəmi “uzaqgörən inqilabçılar” bu torpağı özlərinin şeytani məqsədləri üçün seçib, onu ləkələyib məhv etmək qərarına gəliblər?... Axı bir çox insanlar üçün, hətta uzun illərdən sonra Sibir hələ də kiminsə atası, kiminsə qardaşı, kiminsə sonra oğlu... və ya bəlkə də kiminsə bütün ailəsinin öldüyü “lənətlənmiş” diyar olaraq qaldı.
Heç bilmədiyim nənəm o vaxt atamdan hamilə idi və yolda çox əziyyət çəkirdi. Ancaq təbii ki, heç bir yerdən kömək gözləməyə ehtiyac yox idi... Beləliklə, gənc şahzadə Yelena ailə kitabxanasındakı kitabların sakit xışıltısı və ya pianonun adi sədaları əvəzinə sevimli əsərlərini ifa edərkən, bu dəfə yalnız onun ömrünün qalan saatlarını hədə-qorxu ilə hesabladıqları kimi, o qədər kövrək və əsl kabusa çevrilən təkərlərin məşum səsinə qulaq asdı... O, çirkli vaqonun pəncərəsində kisələrin üstündə oturmuşdu. ona çox yaxşı tanış olan “sivilizasiyanın” son acınacaqlı izlərinə baxaraq, getdikcə daha da uzağa gedir...
Babanın bacısı Aleksandra dostlarının köməyi ilə dayanacaqlardan birində qaça bilib. Ümumi razılığa əsasən, o, (əgər şanslı olsaydı) bütün ailəsinin yaşadığı Fransaya getməli idi. Düzdür, orada olanların heç biri onun bunu necə edə biləcəyini təsəvvür edə bilməzdi, lakin bu, onların kiçik də olsa, yeganə, lakin şübhəsiz ki, son ümidi olduğuna görə, tamamilə ümidsiz vəziyyətlərinə görə bundan imtina etmək çox lüks idi. Həmin an Aleksandranın əri Dmitri də Fransada idi, onun köməyi ilə artıq oradan ümid edirdilər ki, babanın ailəsinə həyatın onları amansızcasına saldığı o kabusdan, alçaqlıqla çıxmağa kömək etməyə çalışacaqlar. qəddar insanların əlləri...
Kurqana çatdıqdan sonra heç nə izah etmədən və heç bir suala cavab vermədən soyuq zirzəmiyə yerləşdirildilər. İki gündən sonra bir neçə nəfər babanın yanına gələrək bildirdilər ki, guya onu başqa “məqsəd”ə “müşayiət” etmək üçün gəliblər... Onu cinayətkar kimi aparıblar, özü ilə heç bir şey aparmağa imkan vermədilər, heç bir rəftar vermədilər. harda və nə qədər müddətə apardıqlarını izah etmək. Babanı bir daha heç kim görmədi. Bir müddətdən sonra naməlum hərbçi babanın şəxsi əşyalarını nənəyə çirkli kömür kisəsində gətirib... heç nə izah etmədən və onu sağ görəcəyinə ümid qalmadı. Bunun üzərinə babanın taleyi ilə bağlı hər hansı bir məlumat dayandı, sanki heç bir iz və sübut olmadan yer üzündən yoxa çıxdı ...
Zavallı şahzadə Yelenanın əzablı, əzablı ürəyi belə bir dəhşətli itki ilə barışmaq istəmədi və o, yerli qərargah zabitini sevimli Nikolayın ölümünün şərtlərini aydınlaşdırmaq tələbləri ilə sanki bombaladı. Ancaq "qırmızı" zabitlər tənha bir qadının istəklərinə kor və kar idilər, necə deyərlər - "zadəgandan", onlar üçün minlərlə və minlərlə adsız "nömrəli" bölmələrdən biri idi və heç bir məna kəsb etmirdi. onların soyuq və qəddar dünyası... Bu, əsl cəhənnəm idi, buradan onun evinin, dostlarının, uşaqlıqdan öyrəşdiyi o tanış və mehriban dünyaya qayıtmaq mümkün deyildi. çox və səmimiyyətlə sevdi.. Və kömək edə biləcək, hətta sağ qalmaq üçün ən kiçik bir ümid verən heç kim yox idi.
Seryoginlər üçünün ağıl varlığını qorumağa çalışdılar və şahzadə Yelenanı hər vasitə ilə şadlandırmağa çalışdılar, lakin o, getdikcə daha da dərinləşdi, demək olar ki, tam stupora girdi və bəzən laqeyd donmuş vəziyyətdə günlərlə oturdu, demək olar ki, heç bir reaksiya vermədi. dostlarının ürəyini və ağlını son depressiyadan xilas etmək cəhdləri. Onu qısaca olaraq real dünyaya qaytaran yalnız iki şey var idi - əgər kimsə onun doğmamış övladı haqqında danışmağa başlasa və ya əgər varsa, sevimli Nikolayın guya ölümü ilə bağlı ən kiçik, yeni təfərrüatlar belə ortaya çıxdı. O, (hələ sağ ikən) həqiqətən nə baş verdiyini və ərinin harada olduğunu və ya heç olmasa cəsədinin harada basdırıldığını (və ya tərk edildiyini) bilmək istəyirdi.
Təəssüf ki, bu iki cəsarətli və parlaq insanın - Yelena və Nikolay de Rohan-Hesse-Obolenskinin həyatı haqqında demək olar ki, heç bir məlumat yoxdur, hətta Yelenanın gəlini Aleksandra yazdığı iki məktubdan bir neçə sətir belə. Alexandranın Fransadakı ailə arxivlərində birtəhər sağ qalan, şahzadənin itkin ərini nə qədər dərin və nəzakətlə sevdiyini göstərir. Yalnız bir neçə əlyazma vərəqləri salamat qalmışdır ki, bəzi sətirləri təəssüf ki, ümumiyyətlə tərtib etmək olmur. Ancaq əldə edilənlər belə, böyük bir insan bədbəxtliyi haqqında dərin ağrı ilə qışqırır, bunu yaşamadan başa düşmək asan və qəbul etmək mümkün deyil.
12 aprel 1927-ci il Şahzadə Yelenanın Alexandra (Aliks) Obolenskayaya məktubundan:
“Bu gün çox yorğunam. O, Sinyaçixadan tamamilə sınmış halda qayıtdı. Vaqonlar adamla doludur, orada mal-qara daşımaq belə ayıb olardı……………………………………………………….. Meşədə dayandıq – oradan elə ləzzətli göbələk və çiyələk iyi gəlirdi... İnanmaq çətindir. ki, bu bədbəxt adamlar orada öldürülüb! Yazıq Elloçka (mənası böyük hersoginya Hessen xəttində babamın qohumu olan Yelizaveta Fedorovna burada yaxınlıqda, bu dəhşətli Staroselimsk mədənində öldürüldü ... nə dəhşətdir! Ruhum bunu qəbul edə bilməz. Yadındadır, “Yerin batsın” demişdik?.. Ulu Tanrı, belə torpaq necə yıxılsın?!..
Oh, Aliks, əziz Aliks! Belə dəhşətə necə öyrəşmək olar? ...................... ...................... Yalvarmaqdan çox yoruldum və özümü alçaldıram... Əgər Çek Alapaevskə sorğu göndərməyə razı olmasa, hər şey tamamilə faydasız olacaq.................. Mən onu harda axtaracağımı heç vaxt bilməyəcəm. , və mən heç vaxt bilməyəcəm ki, ona nə ediblər. Bir saat keçmir ki, mənim üçün belə tanış bir sima haqqında fikirləşməyim... Onun hansısa tərk edilmiş çuxurda və ya şaxtanın dibində yatdığını təsəvvür etmək necə dəhşətdir!.. Bilə-bilə bu gündəlik kabusa necə dözə bilərsən? ki, onsuz da mən onu heç vaxt görməyəcəm?!.. Necə ki, zavallı Vasilek (doğulanda atama verilən ad) onu heç vaxt görməyəcək... Zalımlığın həddi hardadır? Və niyə özlərini insan adlandırırlar?
Xizək sürmə texnikasının təsvirinə başqa, qeyri-adi bir yanaşma var idi, bu da xizəkçinin bədəninin hissələrinə uyğun gələn menteşə sistemindəki hərəkətlərlə əlaqəli deyil. O, "əks sarkaç" və ya "Whitney sarkaç" adlanan tərs sarkaç modelinə əsaslanır.
Bu nəzəri mexanikanın çox maraqlı obyektidir, ilkin olaraq Uitni problemi aşağıdakı kimi tərtib edilmişdir: fərz edək ki, arabaya tərs material sarkacı quraşdırılıb, araba düz bir xəttlə hərəkət edir, lakin vahid YOX. Sürətin zamandan asılılığı qabaqcadan məlum olarsa, onun 2-ci törəməsinin davamlılığı ilə sarkacın arabaya DÜŞMƏYƏN ilkin vəziyyətini tapmaq tələb olunur.
Uitni problemi hələ də riyaziyyatçıları maraqlandırır, lakin tərs məsələ daha vacibdir: arabanın hərəkətinə dinamik nəzarət, beləliklə, sarkaç verilmiş ilkin vəziyyəti saxlasın və ya onun ətrafında yellənsin. Bu tapşırıq robototexnika, naviqasiya, sənaye avtomatlaşdırılması, kosmik gəmilərin oriyentasiyası üçün vacibdir və o, həm də normal gediş zamanı həyata keçirilir.
Ancaq problem ümumiləşdirilə bilər: dayağı artıq ixtiyari, əyri xətti trayektoriya boyunca dəyişən sürətlə, həm də 2 törəmənin davamlılığı şərti ilə hərəkət edən 2 dərəcə sərbəstlikli bir sarkaç üçün. Ümumiləşdirilmiş tərs sarkacın ən sadə nümunəsi: ovucun üstünə uzun bir çubuq qoyaq və əli ixtiyari bir traektoriya boyunca hərəkət etdirərək qeyri-sabit vəziyyətdə saxlayaq.
Əgər daha da ümumiləşdirsək, onda dəyişən uzunluğa malik sarkaç düzəldə bilərik: bu halda onun təbii tezliyi dəyişəcək, tapşırıq xeyli çətinləşəcək. Bu, artıq mexaniki sistemin qeyri-sabit tarazlığının ümumi modelidir, məsələn, ipdə olan bir adam. Ancaq bu problem də fərqli şəkildə tərtib edilə bilər: sarkacın meylini və uzunluğunu aktiv şəkildə dəyişdirərək, müəyyən bir əyri xətti traektoriya boyunca dəstəyin qeyri-bərabər hərəkəti ilə sarkacın tarazlığını təmin etmək. Görürük: bu tənzimləmədə problem xizəkçinin yol boyu hərəkətinə tam uyğundur!
Məlum oldu ki, hələ 1973-cü ildə polşalı riyaziyyatçı Yanuş Moravski tərs sarkaçdan istifadə edərək xizəkçinin mexanikasını təsvir etsə də, bu əsər 40 il ərzində unudulub.
J. Moravskinin modeli mükəmməl deyildi: o, 1970-ci illərin əvvəllərində xizək texnikasında zəruri olan sarkaç dəstəyinin yanal sürüşməsini nəzərə almadı. Ancaq müasir yüksək səviyyəli idmançılarda texnika artıq sürüşmə ilə əlaqəli deyil və model reallıqla daha yaxından uyğunlaşır.
Tərs sarkacın yeni tədqiqatları dar, praktiki problemin həlli ilə başladı: xizək avadanlıqlarının tədqiqi üzrə təcrübələrin aparılmasını sadələşdirmək. Adətən, xizəkçilərin hərəkətlərini öyrənmək üçün onun mövqeyini davamlı olaraq düzəltmək lazımdır və xizəklərdə hərəkət edən çoxlu qüvvələr və xizəkçinin özü mürəkkəb avadanlıq və təcrübələrin uzun müddət hazırlanmasını tələb edir.
2013-cü ildə xizək mexanikasının tanınmış mütəxəssisi Matthias Gilgien sübut etdi ki, əgər kütlə mərkəzinin qar səthinə nisbətən trayektoriyası məlumdursa, xizəklərin trayektoriyası ümumiləşdirilmiş tərs sarkaç modelindən hesablana bilər. eləcə də enmə zamanı bütün hərəkət edən qüvvələr. Nəticədə, bütün mürəkkəb ölçmə avadanlıqları adi GPS naviqatoru ilə əvəz edilə bilər!
Təcrübə diferensial naviqasiya üsulu ilə işləyən geodeziya naviqatoru ilə, koordinatların müəyyən edilməsi dəqiqliyi ilə aparılmışdır: üfüqi müstəvidə 1 sm, şaquli müstəvidə isə 2 sm. Biz həmçinin geodeziya skanerindən istifadə etməklə əldə edilmiş ətraflı 3D relyef modelindən istifadə etdik. İndi ABŞ və Avropanın bəzi əraziləri üçün ictimai sahədə oxşar dəqiqliyə malik peyk 3D xəritələri mövcuddur, onların əhatə dairəsi sürətlə artır.
Yamacda davamlı olaraq dəyişən mikrorelyef nəzərə alınmaqla hündürlük dəqiqliyi 10-20 sm-dir, olanlar. naviqasiya dəqiqliyindən aşağı böyüklük sırası. Naviqatorun antenası xizəkçinin dəbilqəsində idi, CM-nin mövqeyi Robert Reid tərəfindən əvvəlki nəticələrə əsasən hesablanmışdır, o, milli səviyyəli idmançılarda CM-nin boyun və boyun ortasından keçən düz xəttdən çox uzaqlaşmadığını müəyyən etmişdir. xizəklər arasındakı məsafənin ortası. Və xizəkçi, dönərkən başını dik tutmağa çalışır, boynun ortası təxminən antenin altındadır. "Səth-CM" məsafəsi həmişə "səth-baş" məsafəsinin təxminən 0,45-0,5-i təşkil edir, bəzən CM bu mövqedən kənara çıxa bilər, lakin səthin təsvirinin düzgünlüyünü nəzərə alaraq, səthin mövqeyinin hesablanmasında səhvlər. CM əhəmiyyətli deyil, güclü sapmalar yalnız balansın itirilməsi ilə kobud səhvlərlə baş verir.
Bir xizəkçi dəyişən uzunluğa malik ümumiləşdirilmiş tərs sarkaç modeli ilə təsvir edilərsə, məlum traektoriyadan və səthə nisbətən CM sürətindən, onun şaquli mövqedən sapma açılarını hesablamaq olar. , sarkacın düşməməsi üçün. Dəstəyin trayektoriyasını da əldə edə bilərsiniz: xizək qurğuları arasındakı məsafənin ortasında nöqtələr. Və CM-nin dayağa nisbətən mövqeyindən, xizəkçinin uzununa istiqamətdə mərkəzləşməsini və dönüşün mərkəzinə meylini əldə etmək mümkündür, baxmayaraq ki, bədən hissələrinin mövqeyi və nisbi yüklənməsi. xizəkləri hesablamaq mümkün deyil.
GPS ölçmələrinə paralel olaraq, uzun müddət sübut edilmiş üsullarla bədən hissələrinin dinamikasının hesablanması ilə menteşə sistemi modeli əsasında MOCAP üsulları ilə xizək avadanlığının tədqiqində istifadə olunan idarəetmə zonasında adi avadanlıq quraşdırılmışdır. . Daha sonra CM-nin hərəkəti ilə bağlı toplanmış məlumatlar müqayisə edildi: çox yaxın olduğu ortaya çıxdı, yalnız boşalma zamanı sarkacın uzunluğunun kəskin şəkildə dəyişdiyi döngələr arasındakı bölmələrdə güclü uyğunsuzluqlar var.
Lakin vəzifə xizəkçinin mövqeyindən asılı olmayaraq CM hərəkətinin yeni modelini qurmaqdan ibarət deyildi: bu heç kimə lazım deyil! Praktiki məqsəd: tərs sarkaç modelinə əsaslanaraq, xizəkçiyə və xizəklərə təsir edən xarici qüvvələri əldə etmək: səth reaksiyası, qar sürüşməsi və aerodinamik sürtünmə. Dr. M. Gilgien və onun əməkdaşları bütün qüvvələr üçün tənliklər çıxardılar və onları bədən hissələrinin dinamikasından hesablanan dəyərlərlə müqayisə etdilər. Nümunə kimi götürülmüş səth reaksiya qrafikində: mavi əyri tərs sarkaç modelindən hesablanmış qüvvəni, istinad kimi artikulyar sistem modelindən qırmızı əyri göstərir.
İsveçrəli alim Rolf Adelsberger də analoji təcrübə apardı, eyni zamanda xizəklərə yapışdırılmış sensorlar vasitəsilə eniş zamanı xizəklərin deformasiyasını ölçdü. Ölçmə nəticələri M.Gilgien metoduna əsasən GPS məlumatları əsasında da hesablanmış qüvvələrə uyğun gəldi, bu metodun düzgünlüyünü sübut edir.
Sloveniyalı riyaziyyatçı Bojan Nemec də Sloveniya komandası ilə tərs sarkaç modelini öyrəndi, lakin CM-nin mövqeyini daha yaxşı təxmin etmək üçün antenanı xizəkçinin boynuna qoydu. O, fəza meyl bucağının tənliyini əldə etdi: cari sürətlənmələrdən və sarkacın uzunluğundan asılı olaraq.
Görürük: tənlik xizək saytlarında daim müzakirə olunan sadə bucaq düsturlarından daha mürəkkəbdir! Amma bu tənlik eksperimental məlumatlar əsasında əldə edilib və eniş zamanı baş verən real proseslərə daha dəqiq uyğun gəlir. CM-nin mövqeyini dəqiq müəyyən etmək üçün bir düzəliş də əldə edildi, lakin məlum oldu ki, o, çox böyük deyil və M. Gilgien-in daha əvvəl təklif etdiyi kimi, səth ölçmələrinin dəqiqliyinə uyğundur.
Professor B.Nemets, həmçinin yük boşaltma sahələrində güclü uyğunsuzluqları müşahidə etdi və səhvin sarkacın uzunluğunun dəyişməsinin xətti qanunu ilə əlaqəli olduğunu irəli sürdü. Uzunlamasına elastikliyi tətbiq etsək, uzunluq qeyri-xətti dəyişəcək və səhvlər kəskin şəkildə azalacaq. Lakin eyni zamanda, sarkaç yeni bir azadlıq dərəcəsi alacaq: uzunluq harmonik rəqslərə meylli olacaq, bu, modelin tamamilə yenidən işlənməsini tələb edir, B. Nemets bunu aşağıdakı işlərdə etməyi planlaşdırır. Əsas problem: uzununa vibrasiyaların təbii tezliyinin asılı olduğu elastiklik əmsalının tətbiqi, çünki əmsalın dəyərinin də sabit olmaması mümkündür.
Bu halda yeni effekt əldə etmək mümkündür: sarkaç dayağı şaquli istiqamətdə, yüksək tezlikli və kiçik amplituda titrəyirsə, o zaman sarkacı şaquli tarazlıqda saxlayan əlavə qüvvə yaranır: bu hadisəni P. Kapitsa və minimum salınım tezliyini və onların həddi amplitudasını təyin etdi. Elastik bir səthə tək bir zərbəyə cavab olaraq, sönümlü salınımlar meydana gəlir, buna görə də elastik dayağa quraşdırılmış tərs sarkaç da tarazlıqda olacaq, lakin təsirdən sonra çox qısa müddət ərzində: salınımlar sönünə qədər. Bənzər bir fenomen, xizəklərdə yükün kəskin dəyişməsi ilə mümkündür, lakin onların uzunlamasına elastikliyi əyilmənin böyüklüyündən asılıdır, vəzifə daha da mürəkkəbləşir.
Lakin qüvvələrin hesablanması da son məqsəd deyildi: doktor M.Gilgien xizəkçinin dizlərində yüklər aldı, bu da oynaqların zədələnməsinə səbəb ola bilər. Onun metodu nəzarət keçidləri zamanı yalnız GPS məlumatları əsasında marşrutun təhlükəsizlik baxımından qiymətləndirilməsini əldə etməyə imkan verir.
Başqa bir istiqamət, həmişə olduğu kimi, birbaşa müşahidədən gizlədilən xizəkçinin dinamikasını davamlı olaraq göstərən məşqçilər üçün alət yaratmaqdır: tarazlıq şərtləri, hərəkət edən sürətlər və qüvvələr. Bu üsul mürəkkəb, bahalı avadanlıq tələb etmir, çünki hətta çox bahalı GPS qəbuledicisi MOCAP sistemlərindən və ya inertial sensorlardan bir neçə dəfə ucuzdur və istifadəsi çox asandır.
Görürük: xizək sürmə texnikasını xizəkçinin hərəkətindən asılı olmayaraq təsvir etmək üçün köhnə fikir, yeni texnologiyaların yaranmasına baxmayaraq, hələ də unudulmur. Ola bilsin ki, şirin sferik atlarla erkən vidalaşaq.
Uğurlar və balans!

Bütöv bir kateqoriya kimi maliyyə strukturu özünəməxsus ümumi xüsusiyyətləri ilə bir-biri ilə əlaqəli bir neçə əlaqəni əhatə edir ...

Bu, şirkətin sıfır qazanc əldə edəcəyi, yəni gəlirlərin xərcləri tam ödəyəcəyi andır.O, mühüm rol oynayır ...
ROA (Return on Assets) nisbəti şirkətin xalis mənfəətinin onun aktivlərinə nisbətini əks etdirir və...

Tək istehsal müxtəlif məhsulların istehsalı üçün çox sayda sifariş ilə xarakterizə olunur, lakin eyni zamanda ...

PDO əmrinin keçməsi cədvəlinə əsasən yenilənmiş rüblük və aylıq təqvim cədvəlləri hazırlanır ...
Plan əməliyyat və istehsal planlaşdırma 2. Əməliyyat və istehsal planlaşdırılmasının xüsusiyyətləri bir ...
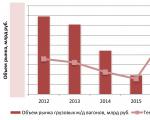
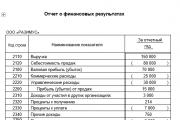
Tədqiqatın aktuallığı İxtisaslaşdırılmış vaqon parkı, əlbəttə ki, yenilənməlidir -...
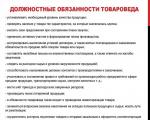
Diqqətinizə 2019/2020-ci il nümunəsi olan merçendayzer üçün iş təsvirinin tipik nümunəsini təqdim edirik....

Hal-hazırda, strateji idarəetmə üçün çox perspektivli bir vasitə balanslaşdırılmış ...

Əsas vəsaitlər bir təşkilatın mülkiyyətində (əmtəə, digər material) istifadə olunan ...
Əsas istehsal fondlarından istifadə səviyyəsini qiymətləndirmək üçün göstəricilər sistemindən istifadə olunur. mən....
Rıbçinskinin teoremi Polşa əsilli ingilis iqtisadçısı Tadeuş Rıbçinski (1923-1998) gəldiyi nəticəyə aydınlıq gətirdi...
Məhsulun identifikasiyası müəyyən bir homojenliyə uyğunluğu təyin etməyə imkan verən bir prosedurdur ...

Mərkəzi Seçki Komissiyasının rəhbəri Ella Pamfilovanın sözlərinə görə, sentyabrın 10-da keçirilən regional seçkilərdə daxil olan şikayətlərin sayı...
“Regionlar klubu”na bu dəfə Moskva vilayətinin qubernatoru Andrey Vorobyov da daxil idi. Mütəxəssislər qeyd ediblər...

Çox vaxt belə aksiyaların obyekti gənclərdir. Beləliklə, "VKontakte" sosial şəbəkəsində Perm ərazisinin icmalarında ...