Родовое проклятие князей юсуповых
История рода Юсуповых Согласно документам, биография княжеского рода уходит корнями в Багдадский халифат X века, где...
Электрический двигатель - это машина, преобразующая электрическую энергию в механическую. Первые электродвигатели появились в середине 19 века. Успехи в их разработке связывают с именами таких выдающихся физиков и инженеров, как Н.Тесла, Б.Якоби, Г.Феррарис, В.Сименс.
Различают электро двигатели постоянного и переменного тока. Преимущество первых заключается в возможности экономичного и плавного регулирования частоты вращения вала. Преимущество вторых - большая удельная мощность на единицу веса. В микроконтроллерной практике часто применяют низковольтные двигатели постоянного тока, используемые в бытовых и компьютерных вентиляторах (Табл. 2.13). Встречаются также конструкции с сетевыми двигателями.
Таблица 2.13. Параметры вентиляторов фирмы Sunon
Обмотку двигателя следует рассматривать как катушку с большой индуктивностью, поэтому её можно коммутировать обычными транзисторными ключами (Рис. 2.78, а…т). Главное - это не забыть про защиту от ЭДС самоиндукции.
В двигателях постоянного тока имеется возможность изменять направление вращения ротора в зависимости от полярности рабочего напряжения. В таких случаях широко используют мостовые схемы «Н-bridge» (Рис. 2.79, а…и).

(начало):
а) регулирование скорости потока воздуха вентилятора M1. Конденсатор С/ уменьшает ВЧ- помехи. Диод VD1 защищает транзистор VT1 от выбросов напряжения. Резистор R1 определяет степень насыщения транзистора Г77, а резистор R2 закрывает его при рестарте MK. Частота импульсов ШИМ на выходе МК должна быть не менее 30 кГц, т.е. за пределами звукового диапазона, чтобы исключить неприятный «свист». Элементы С/ и R2 могут отсутствовать;
б) плавное регулирование частоты вращения вала двигателя M1 через канал ШИМ. Конденсатор С/ является первичным, а конденсатор С2- вторичным фильтром сигналов ШИМ; О

Рис. 2.78. Схемы подключения электродвигателей через транзисторные ключи
(продолжение):
в) транзисторы VT1, VT2 соединяются параллельно для увеличения суммарного коллекторного тока. Резисторы R1, R2 обеспечивают равномерную нагрузку по мощности на оба транзистора, что связано с разбросом у них коэффициентов И 2]Э и ВАХ переходов «база - эмиттер»;
г) двигатель M1 (фирма Airtronics) имеет «цифровой» вход управления, что позволяет подключать к нему MK напрямую. Транзисторные ключи (драйверы) находятся внутри двигателя;
д) два отдельных источника питания позволяют значительно снизить влияние на MK электрических помех, которые генерирует двигатель M1. Система будет работать устойчивее. GB1 - это маломощная литиевая батарея, GB2, GB3 - это пальчиковые гальванические элементы с общим напряжением 3.2 В и мощностью, достаточной для запуска и работы двигателя M1\
е) параллельные резисторы R2, R3 служат ограничителями тока, протекающего через двигатель M1. Кроме того, они стабилизируютток в нагрузке, если транзистор VT1 находится в активном режиме или на грани входа в режим насыщения;
ж) MK включает/выключает двигатель M1. Резистором R3 подстраивается частота оборотов его вала. Стабилизатором служит «магнитофонная» микросхема DA1 фирмы Panasonic. С её помощью на зажимах двигателя M1 поддерживаются постоянные параметры, которые практически не зависят от колебаний температуры и напряжения питания;
з) дроссели L7, L2 и конденсаторы C7, С2фильтруют излучаемые двигателем радиопомехи. С той же целью двигатель помещается в заземлённый экранированный корпус;

Рис. 2.78. Схемы подключения электродвигателей через транзисторные ключи
(продолжение):
и) вибромотор M1 является источником мощных электромагнитных и радиочастотных помех. Элементы L/, L2, C1 служат фильтрами. Резистор R2 ограничивает пусковой ток через два приоткрытом транзисторе VT1 Диоды VD1, УА2срезаютвершиныимпульсныхпомех;
к) элементы VD1, C1 и VD2, &2фильтруют помехи по питанию, которые генерирует двигатель M1 в направлении к MK. Частоту оборотов вала двигателя можно плавно регулировать через канал ШИМ MK, при этом отдельный ФНЧ не требуется, поскольку двигатель имеет большую инерцию и сам сглаживает проходящие через него ВЧ-импульсы тока;
л) применение ключа на полевом транзисторе VT1 повышает КПД по сравнению с ключом на биполярном транзисторе, ввиду более низкого сопротивления «сток - исток». Резистор R1 ограничивает амплитуду наводок, которые могут «просачиваться» от работающего двигателя M1 во внутренние цепи MK через ёмкость «затвор - сток» транзистора VT1;
м) транзистор VT2 является мощным силовым ключом, который подаёт питание на двигатель ML а транзистор VT1 - демпфером, который быстро тормозит вращение вала после выключения. Резистор R1 снижает нагрузку на выход MK при заряде ёмкостей затворов полевых транзисторов VT1, VT2. Резистор Я2отключаетдвигатель M1 при рестарте MK;
н) ключ на транзисторах VT1, VT2 собран по схеме Дарлингтона и имеет большое усиление. Для регулирования скорости вращения вала двигателя M1 может применяться метод ШИМ или фазо-импульсное управление. Система не имеет обратной связи, поэтому при снижении скорости вращения из-за внешнего торможения будет уменьшаться рабочая мощность на валу;

Рис. 2.78. Схемы подключения электродвигателей через транзисторные ключи
(продолжение):
м) встраивание MK в уже существующий тракт регулирования скорости вращения вала двигателя Ml. В этот тракт входят все элементы схемы, кроме резистора R2. Резистором R4 выставляется «грубая» частота вращения. Точная подстройка осуществляется импульсами с выхода MK. Возможна организация обратной связи, когда МК следит за каким-либо параметром и динамично подстраивает скорость вращения в зависимости от напряжения питания или температуры;
о) скорость вращения вала двигателя M1 определяется скважностью импульсов в канале ШИМ, генерируемых с нижнего выхода MK. Основным коммутирующим ключом служит транзистор VT2.2, остальные транзисторные ключи участвуют в быстрой остановке двигателя M1 по сигналу ВЫСОКОГО уровня с верхнего выхода MK;
п) плавное регулирование частоты оборотов вала двигателя M1 производится резистором R8. ОУ ТШ служит стабилизатором напряжения с двойной обратной связью через элементы R1, R8, C2 и R9, R10, C1. Комбинацией уровней с трёх выходов MK (ЦАП) можно ступенчато изменять скорость вращения вала двигателя M1 (точный подбор резисторами R2…R4). Линии MK могут переводиться в режим входа без « pull-up» резистора для увеличения числа «ступенек» ЦАП;

Рис. 2.78. Схемы подключения электродвигателей через транзисторные ключи (окончание):
p) фазо-импульсное управление двигателем переменного тока M1. Чем большее время за период сетевого напряжения открыт транзистор VT1, тем быстрее вращается вал двигателя;
с) включение мощного двигателя переменного тока Ml производится через оптотиристор KS7, который обеспечивает гальваническую развязку от цепей MK;
т) аналогично Рис. 2.78, п, но с одним кольцом обратной связи через элементы C7, R6, R8. Резистор R4 регулирует частоту вращения вала двигателя Ml плавно, а MK - дискретно.

Рис. 2.79. Мостовые схемы подключения электродвигателей к MK (начало):
а) направление вращения вала двигателя Ml изменяется мостовой «механической» схемой на двух группах контактов реле KL1, K1.2. Частота переключения контактов реле должна быть низкой, чтобы быстро не выработался ресурс. Дроссели L7, L2 снижают коммутационные токи при переключении реле и, соответственно, уровень излучаемых электромагнитных помех;

б) при ВЫСОКОМ уровне на верхнем и НИЗКОМ уровне на нижнем выходе МК транзисторы К77…к ТЗ открываются, а транзисторы КГ4…КГ6закрываются,инаоборот. Когда полярность питания двигателя Ml изменяется на противоположную, то его ротор вращается в обратную сторону. Сигналы с двух выходов МК должны быть противофазными, но с небольшой паузой НИЗКОГО уровня между импульсами, чтобы закрыть оба плеча (устранение сквозных токов). Диоды VD1..VD4уменьшают выбросы напряжения, тем самым защищая транзисторы от пробоя;
в) аналогично Рис. 2.79, б, но с другими номиналами элементов, а также с аппаратной защитой от одновременного открывания транзисторов одного плеча при помощи диодов VD3, VD4. Диоды VD1, КД2повышают помехоустойчивость при большом расстоянии до MK. Конденсатор С/ снижает «искровые» импульсные радиопомехи, генерируемые двигателем Ml;

Рис. 2.79. Мостовые схемы подключения электродвигателей к MK (продолжение):
г) аналогично Рис. 2.79, б, но с отсутствием «запирающих» резисторов в базовых цепях транзисторов VT2, VT4. Расчётнато,чтообмоткадвигателяЛ//достаточнонизкоомная,следователо, при рестарте МК внешние помехи на «висящих в воздухе» базах транзисторов VT1 VT2, VT4, VT6 не смогут открыть их коллекторные переходы;
д) аналогично Рис. 2.79, б, но с максимальным упрощением схемы. Рекомендуется для устройств, выполняющих второстепенные функции. Напряжение питания +Е и должно соответствовать рабочему напряжению двигателя M1\
е) в отличие от предыдущих схем, транзисторы VT1…VT4 включаются по схеме с общим эмиттером и управляются ВЫСОКИМ/НИЗКИМ уровнем непосредственно с выходов MK. Двигатель M1 должен быть рассчитан на рабочее напряжение 3…3.5 В. Диоды VD1… VD4 уменьшают выбросы напряжения. Фильтр LL C1 снижает импульсные помехи по питанию от двигателя M1, которые могут приводить к сбоям в работе MK. Встречающиеся замены деталей: VT1 VT3- KT972; VT2, VT4- KT973; VD1…VD4- КД522Б, R x = 3.3 кОм; R 2 = 3.3 кОм;
ж) мостовая схема на четырёх управляющих транзисторах VT1 VT2, VT4, VT5 структуры р-п-р. Подстроечным резистором R4 регулируется напряжение на двигателе Ml, а значит, и частота оборотов сразу для двух направлений вращения ротора;

Рис. 2.79. Мостовые схемы подключения электродвигателей к MK (окончание):
з) мостовая схема для управления мощным двигателем Ml (24 В, 30 А). Смена полярности напряжения на двигателе производится противофазными уровнями на средних выходах MK, а скорость вращения - методом ШИМ на верхнем и нижнем выходах MK;
и) транзисторы VT2, VT5 подают питание на мостовую схему управления двигателем Ml. Их запараллеливание позволяет подключить к диоду VD1 ещё одну такую же схему.
Двигатель постоянного тока способствует превращению энергии постоянного тока в работу механического типа.
На сегодняшний день практичное управление осуществляется не только в соответствии с традиционными схемами, но также согласно достаточно оригинальным или малоизвестным схемотехническим решениям.
Самым простым способом регулировки скорости двигательного вращения является применение модуляции (РWМ) широтно-импульсного типа, или ШИМ.
Данный способ базируется на подаче питающего напряжения на движок в форме импульсов со стабильной частотой следования, но изменением длительности.
Вся ШИМ-сигнальная система имеет очень важный критерий, представленный коэффициентом стандартного заполнения (Duty сyсlе).
Такая величина соответствуют соотношению импульсной длительности к его периоду:
D = (t/Т) × 100 %
Для самой простой схемы реализации управления ДПТ характерно наличие полевой транзисторной части с подачей на затвор ШИМ-сигнальной системы. В подобной схеме транзистор представляет особый электронный ключ, которым один из двигательных выводов коммутируется на землю. В этом случае открытие полупроводникового триода осуществляется именно на момент импульсной длительности.

Конструкция двигателя постоянного тока
При низкой частоте и в условиях незначительного коэффициента ШИМ-сигнала преобразующее устройство срабатывает рывками. Высокая частота РWМ, составляющая несколько сотен Герц, способствует непрерывному вращению мотора, а скорость вращательного движения в этом случае изменяется строго пропорционально коэффициенту заполняемости.
Известно множество схематичных решений, генерирующих ШИМ-сигнал, но к числу наиболее простых относится «схема таймера 555», нуждающаяся в минимальном количестве компонентов и не требующая особой настройки.
Использование биполярного транзистора в качестве надежного переключателя - один из способов управления двигателем. Выбор пассивного элемента электрической цепи, или R, предполагает протекание тока, не превышающего показатели максимальных токовых величин в микроконтроллере.
Полупроводниковый триод должен иметь соответствующий коллекторный ток и оптимальные максимальные значения, а также выделяемую мощность:
P = Uкэ × Iк.
Одной из проблем, возникающих в процессе использования биполярных полупроводниковых триодов, является избыточный базовый ток.

Схема управления
Как правило, токовое соотношение на выходном сигнале и входном транзисторе составляет 100 hfe. Функционирование элемента в условиях насыщения вызывает сильное снижение коэффициента.
Оптимальным вариантом является транзисторное комбинирование, или высокоэффективный транзистор Дарлингтона, который характеризуется высокими показателями токового усиления и незначительной скоростью работы.
При выборе индуктивной нагрузки, представленной двигателем, решение проблемы режима плавного управления мощностными показателями мотора не всегда дается легко, что зависит от нескольких факторов, представленных:

Управление двигателями постоянного тока
Оптимальным вариантом для решения практически всех перечисленных выше проблем является использование частотных инверторов.
Индуктивный тип схемы для управления двигателем ПТ не отличается особой сложностью по сравнению с частотным управлением, а также способен обеспечивать вполне приемлемую результативность.
 Качественное управление нагрузкой не требует в некоторых случаях потенциометра, а может быть задействовано на использовании микроконтроллера.
Качественное управление нагрузкой не требует в некоторых случаях потенциометра, а может быть задействовано на использовании микроконтроллера.
Наиболее важные проблемы управления представлены:
Важно помнить, что данная схемотехника отличается незначительной сложностью, при которой инициализация микроконтроллера требует достаточного количества времени, что обусловлено конкретно решаемыми задачами при нахождении выходных сигналов в третьем состоянии.
![]()
Классическая схема включения MOSFET в ключевом режиме
Такой тип канала, как правило, подсоединяется таким образом, чтобы на сток приходились наиболее отрицательные показатели напряжения по сравнению с истоком.
MOSFET-транзисторы высокой степени мощности достаточно популярны, что обусловлено исключительно высокой переключательной скоростью в условиях низкого уровня мощности управления, прикладываемой к затвору.
Процесс управления достаточно мощным двигателем ПТ осуществляется посредством реле-модуля спаренного типа. Процесс подключения мотора к реле предполагает обязательный учет наличия трех выходных отверстий:

Управление направлением вращения двигателя постоянного тока
Контактная группа устройства, преобразующего любой вид энергии в работу механического типа, подсоединяется к общим релейным контактам (СОМ). «Плюс» элемента питания подключается к контактам нормально-разомкнутого реле (NО), а «минус» фиксируется на контактной группе реле нормально-замкнутого типа (NС).
Реализация полного мостоуправления двигателя осуществляется при включении и выключении реле соответствующим образом.
Управление двигателем посредством H-моста с управляющими логическими сигналами на входах и вращением в две стороны осуществляется несколькими вариантами Н-мостов:

Транзисторный Н-мост
Самым простым вариантом станет сборка Н-моста на МОSFЕT-транзисторах. Именно этот способ сочетает в себе легкость выполнения и достаточные показатели мощности, но не предполагает одновременную подачу на две единицы.
Известно множество вариантов микросхем, используемых для управления двигателем, включая ТLЕ4205 и L298D, а также стандартные электромагнитные реле, но перечисленные выше способы относятся к категории самых доступных.
Для управления двигателем шагового типа необходима подача постоянного напряжения на обмоточную часть с соблюдением максимально точной последовательности, благодаря чему обеспечивается точность угла осевого поворота.
Шаговые двигатели, имеющие постоянные магниты, чаще всего применяются в бытовых приборах, но могут встречаться в устройствах промышленного типа. Доступные по стоимости двигатели обладают низким крутящим моментом и низкой скоростью вращения, благодаря чему прекрасно подходят для компьютеров.

Управление шаговым двигателем
Изготовление двигателей шагового типа на основе постоянных магнитов не отличается сложностью и экономически целесообразно только при больших объемах производства, а ограниченность использования обусловлена относительной инертностью и неприемлемостью применения в условиях точного временного позиционирования.
Шагового типа двигатели, имеющие магнитное сопротивление в условиях отсутствия стабильного магнита, характеризуются свободным роторным вращением без крутящего вращения остаточного типа. Такие двигатели, как правило, устанавливаются в компактных агрегатах, включая системы микро-позиционирования. Основные достоинства такой схемы представлены чувствительностью к токовой полярности.
Вариант характеризуется очень удачным сочетанием принципа работы моторов с переменными и постоянными магнитами.
Значительное количество двигателей гибридного типа отличается классическим двухфазным строением.
Необходимость выполнять изменение полярности напряжения может возникать в процессе управления двигателем или при использовании схемы мостового преобразователя напряжения. В этом случае ключи чаще всего представлены реле, полевыми и биполярными транзисторами, а также H-мостами, встраиваемыми в микросхему.
Схема пуска двигателя постоянного тока с независимым возбуждением по принципу времени
Эта схема представлена на рис. 1.1, а . Она содержит кнопки управления SB 1 (пуск) и SB 2 (останов) двигателя, линейный контактор КМ 1, обеспечивающий подключение двигателя к сети, и контактор ускорения КМ 2 для шунтирования пускового резистора R д. В качестве датчика времени в схеме используется электромагнитное реле времени КТ . При подключении схемы к источнику напряжения U происходит возбуждение двигателя и срабатывает реле КТ , размыкая свой размыкающий контакт в цепи катушки контактора КМ 2 и подготавливая двигатель к пуску.
Рис. 1.1. Схема пуска двигателя по принципу времени (а ), характеристики двигателя (б) и кривые переходного процесса (в)
Пуск двигателя начинается после нажатия кнопки S В1, в результате чего получает питание контактор КМ 1, который своим главным силовым контактом подключает двигатель к источнику питания. Двигатель начинает разбег с резистором R д в цепи якоря, с помощью которого ограничивается пусковой ток двигателя. Одновременно замыкающий блок-контакт контактора КМ 1 шунтирует кнопку S В1, и она может быть отпущена, а размыкающий блок-контакт КМ 1 разрывает цепь питания катушки реле времени КТ. Через интервал времени Δt к.т после прекращения питания катушки реле времени, называемый выдержкой времени, размыкающий контакт КТ замкнется в цепи катушки контактора КМ 2, последний включится и главным контактом закоротит пусковой резистор R д в цепи якоря. Таким образом, при пуске двигатель в течение времени Δt к.т разгоняется по искусственной характеристике 1 (рис. 1.1, б), а после шунтирования резистора R д – по естественной 2 . Значение сопротивления резистора R д выбирается таким образом, чтобы в момент включения двигателя ток I 1 в цепи и соответственно момент М 1 , не превосходили бы допустимого уровня.
За время Δt к.т после начала пуска частота вращения двигателя достигает значения ω 1 , а ток в цепи якоря снижается до уровня I 2 (рис. 1, в). После шунтирования R д, происходит бросок тока в цепи якоря от I 2 до I 1 который не превышает допустимого уровня. Изменение частоты вращения, тока и момента во времени происходит по экспоненте.
Останов двигателя осуществляется нажатием кнопки S В 2, что приведет к отключению якоря двигателя от источника питания и его торможению под действием момента сопротивления на валу. Такой способ останова двигателя получил название «торможение выбегом».
Схема пуска двигателя в две ступени по принципу ЭДС и динамического торможения по принципу времени.
В этой схеме (рис. 1.2, а) в качестве датчика ЭДС использован якорь двигателя, к которому подключены катушки контакторов ускорения КМ 1 и КМ 2, обеспечивающих шунтирование пусковых резисторов R д1 и R д2 . С помощью регулировочных резисторов R у1 , и R у2 , которые могут быть настроены на срабатывание при определенных частотах вращения двигателя.

Рис. 1.2. Схема пуска двигателя по принципу ЭДС и динамического торможения по принципу времени (а) и характеристики двигателя (б )
Для осуществления торможения в схеме предусмотрен резистор R 3 , подключение и отключение которого осуществляется контактором торможения КМ З. Для обеспечения выдержки времени используется электромагнитное реле времени КТ, размыкающий контакт которого включен в цепь катушки контактора торможения КМ 2.
После подключения схемы к источнику питания происходит возбуждение двигателя, а аппараты схемы остаются в исходном положении. Пуск двигателя осуществляется нажатием кнопки S В 1, что приводит к срабатыванию линейного контактора КМ и подключению двигателя к источнику питания. Двигатель начинает разбег с включенными резисторами R д1 + R д2 в цепи якоря по характеристике 1 (рис. 1.2, б). По мере увеличения частоты вращения двигателя растет его ЭДС и соответственно напряжение на катушках контакторов КМ 1 и КМ 2. При частоте вращения ω 1 срабатывает контактор КМ 1, закорачивая своим контактом первую ступень пускового резистора R д1, и двигатель переходит на характеристику 2 . При частоте вращения ω 2 срабатывает контактор КМ 2,шунтируя своим контактом вторую ступень пускового резистора R д2. Двигатель переходит на естественную характеристику 3 и заканчивает свой разбег в точке установившегося режима с координатами ω с – М с, определяемой пересечением естественной характеристики 3 двигателя и характеристики нагрузки.
Для перехода к режиму торможения нажимается кнопка SB 2. Катушка контактора КМ теряет питание, размыкается замыкающий силовой контакт КМ в цепи якоря двигателя, и он отключается от источника питания. Размыкающий блок-контакт КМ 3 замыкается, последний срабатывает и своим главным контактом подключает резистор R д3 к якорю М, переводя двигатель в режим динамического торможения по характеристике 4 (рис. 1.2, б ). Одновременно размыкается замыкающий контакт контактора КМ в цепи реле времени КТ, оно теряет питание и начинает отсчет времени. Через интервал времени, который соответствует снижению частоты вращения двигателя до нуля, реле времени отключается и своим контактом разрывает цепь питания контактора КМ З. Резистор R д3 отключается от якоря М двигателя, торможение заканчивается, и схема возвращается в свое исходное положение.
Применение динамического торможения обеспечивает более быстрый останов двигателя и тем самым быстрое прекращение движения исполнительного органа рабочей машины.
Схема пуска двигателя в одну ступень по принципу времени и динамического торможения по принципу ЭДС.
Управление двигателем при пуске происходит по аналогии со схемой рис. 1.1. При включении двигателя в этой схеме (рис. 1.3) и работе от источника питания размыкающий контакт линейного контактора КМ в цепи контактора торможения КМ 2 разомкнут, что предотвращает перевод двигателя в режим торможения.

Рис. 1.3. Схема пуска двигателя по принципу времени и динамического торможения по принципу ЭДС
Торможение осуществляется нажатием кнопки S В2. Контактор КМ, потеряв питание, отключает якорь двигателя от источника питания и замыкает своим контактом цепь питания катушки контактора КМ 2. Последний от действия наведенной в якоре ЭДС срабатывает и замыкает якорь М на резистор торможения R д1 . Процесс динамического торможения происходит до тех пор, пока при небольшой частоте вращения двигателя его ЭДС не станет меньше напряжения отпускания контактора КМ 2, который отключится, и схема вернется в исходное положение.
Схема управления пуском двигателя по принципу времени, реверсом и торможением противовключением по принципу ЭДС
В этой схеме (рис. 1.4, а) предусмотрено два линейных контактора КМ 1 и КМ 2, обеспечивающих его вращение соответственно в условных направлениях «Вперед» и «Назад». Главные контакты этих аппаратов образуют реверсивный контактный мостик, с помощью которого можно изменить полярность напряжения на якоре М и тем самым осуществлять торможение противовключением и реверс (изменение направления вращения) двигателя. В якорной цепи помимо пускового резистора R д1 включен резистор противовключения R д2 , который управляется контактором противовключения КМ З.

Рис. 1.4. Схема управления пуском и реверсом двигателя (а ) и характеристики двигателя (б)
Управление двигателем при торможении противовключением и реверсе осуществляется с помощью двух реле противовключения К V 1 и К V 2. Их назначение в том, чтобы в режиме противовключения для ограничения тока в якоре до допустимого уровня обеспечить ввод в цепь якоря в дополнение к пусковому резистору R д1 , резистор противовключения R д2 , что достигается выбором точки присоединения катушек реле К V 1 и К V 2 к резистору (R д1 + R д2).
Пуск двигателя в любом направлении осуществляется в одну ступень в функции времени. При нажатии, например, кнопки S В 1 срабатывает контактор КМ 1 и подключает якорь М к источнику питания. За счет падения напряжения на резисторе R д1 , от пускового тока срабатывает реле времени КТ, размыкающее свой контакт в цепи контактора КМ.
Включение КМ 1 приведет также к срабатыванию реле К V 1, которое замкнет свой замыкающий контакт в цепи контактора противовключения КМ З. Это вызовет включение КМ З, что приведет к закорачиванию ненужного при пуске резистора противовключения R д2 и одновременно катушки реле времени КТ. Двигатель начнет разбег по характеристике 2 (рис. 1.4, б), а реле времени КТ – отсчет выдержки времени.
По истечении выдержки времени реле КТ замкнет свой контакт в цепи катушки контактора КМ, он включится, закоротит пусковой резистор R д1 и двигатель выйдет на свою естественную характеристику 1.
Для осуществления торможения нажимается кнопка S В 2, в результате чего отключаются контактор КМ 1, реле К V 1, контакторы КМ З и КМ 4 и включается контактор КМ 2. Напряжение на якоре двигателя изменяет свою полярность, и двигатель переходит в режим торможения противовключением с двумя резисторами в цепи якоря R д1 и R д2 . Несмотря на замыкание контакта КМ 2 в цепи реле К V 2, оно в результате оговоренной выше настройки не включается и тем самым не дает включиться аппаратам КМ З и КМ 4 и зашунтировать резисторы R д1 и R д2 .
Перевод двигателя в режим противовключения соответствует его переходу с естественной характеристики 1 на искусственную характеристику 4 (рис. 1.4, б). Во всем диапазоне частот вращения 0 < ω < ω 0 на этой характеристике двигатель работает в режиме противовключения.
По мере снижения частоты вращения двигателя растет напряжение на катушке реле К V 2, и при частоте вращения, близкой к нулю, оно достигнет напряжения срабатывания. Если к этому моменту времени кнопка S В 2 будет отпущена, то отключается контактор КМ 2, схема возвращается в исходное положение и на этом процесс торможения заканчивается.
Если же при достижении малой частоты вращения кнопка S В 2 остается нажатой, то включается реле К V 2 и процесс пуска двигателя повторяется, но уже в противоположную сторону. Таким образом, реверсирование двигателя включает в себя два этапа: торможение противовключением и пуск в противоположном направлении. Второй этап реверса изображен на рис. 1.4, б переходом двигателя с характеристики 4 на характеристику 3, соответствующую обратной полярности напряжения на якоре двигателя и наличию в якоре добавочного резистора R д1 .
Схема пуска двигателя постоянного тока с последовательным возбуждением по принципу тока
В этой схеме (рис. 1.5) используется реле тока КА, катушка которого включена в цепь якоря М, а размыкающий контакт – в цепь питания контактора ускорения КМ 2. Реле тока настраивается таким образом, чтобы его ток отпускания соответствовал току I 2 (см. рис. 1.1, б). В схеме используется также дополнительное блокировочное реле К V с временем срабатывания большим, чем у реле КА.

Рис. 1.5. Схема пуска двигателя по принципу тока
Работа схемы при пуске происходит следующим образом. После нажатия на кнопку S В 1 срабатывает контактор КМ 1, двигатель подключается к источнику питания и начинает свой разбег. Бросок тока в якорной цепи после замыкания главного контакта контактора КМ 1 вызовет срабатывание реле тока КА, которое разомкнет свой размыкающий контакт в цепи контактора КМ 2. Через некоторое время после этого срабатывает К V и замыкает свой замыкающий контакт в цепи контактора КМ 2, подготавливая его к включению.
По мере разбега двигателя ток якоря снижается до значения тока переключения I 2 . При этом токе отключается реле тока и замыкает свой размыкающий контакт в цепи катушки контактора КМ 2. Последний срабатывает, его главный контакт закорачивает пусковой резистор R д, в цепи якоря, а вспомогательный контакт шунтирует контакт реле тока КА. Поэтому вторичное включение реле тока КА после закорачивания R д и броска тока не вызовет отключения контактора КМ 2 и двигатель продолжит разбег по своей естественной характеристике.
Схема типовой панели управления двигателем, обеспечивающая пуск, динамическое торможение и регулирование частоты вращения ослаблением магнитного потока
Типовые релейно-контакторные схемы управления ЭП содержат элементы блокировок, защит, сигнализации, а также связи с технологическим оборудованием. Для унификации схемных решений электротехническая промышленность выпускает стандартные станции, блоки и панели управления, специализированные по видам ЭП рабочих механизмов, функциональным возможностям, условиям эксплуатации, роду тока и т.д. Ниже в качестве примера рассмотрена схема одного из таких типовых устройств (рис. 1.6).

Рис. 1.6. Схема типовой панели управления двигателем
Органом управления в этой схеме является командоконтроллер S А, имеющий четыре положения рукоятки: одно нулевое (начальное) и три рабочих (см. рис. 1.6). Пуск двигателя осуществляется в три ступени по принципу времени, торможение – динамическое по принципу ЭДС.
Перед пуском командоконтроллер устанавливается в нулевое положение, затем включаются автоматические выключатели QF 1 и QF 2 и ЭП подключается к источнику питания. По обмотке ОВ возбуждения начинает протекать ток возбуждения, и, кроме того, срабатывает реле времени КТ 1, шунтируя в цепи реле контроля напряжения своим контактом контакт реле КА обрыва цепи обмотки возбуждения. Если при этом реле максимального тока КА 1 и КА 2 находятся в нормальном (отключенном) положении, то срабатывает реле К V 4, подготавливая питание схемы управления через свой замыкающий контакт. Если в процессе работы произойдет недопустимое снижение напряжения питания или тока возбуждения двигателя или ток в якоре превысит допустимый уровень, то произойдет отключение реле К V 4, схема управления лишится питания и двигатель будет отключен от сети. Таким образом, реле выполняет роль исполнительного элемента трех защит.
Для пуска двигателя до максимальной частоты вращения рукоятка командоконтроллера S А перемещается в крайнее третье положение. Это приведет к срабатыванию контактора КМ и подключению якоря М двигателя к источнику питания, после чего он начнет свой разбег с полным сопротивлением пускового резистора в цепи якоря. Реле времени КТ 1, потеряв питание вследствие размыкания контакта КМ, начнет отсчет выдержки времени работы на первой ступени, а реле времени КТ2 и КТ З, сработав от падения напряжения на резисторах R д1 и R д2 , разомкнут свои контакты в цепях контакторов ускорения КМ 2 и КМ 3. Одновременно с этим включаются «экономический» контактор КМ 6 и контактор управления возбуждением КМ З, в результате чего шунтируется резистор R в и пуск двигателя происходит при полном магнитном потоке.
Через определенное время замкнется размыкающий контакт КТ 1, контактор КМ 1 включится, зашунтирует первую ступень пускового резистора R д1 и одновременно катушку реле времени КТ2. Последнее, отсчитав свою выдержку времени, включит контактор КМ 2, который зашунтирует вторую ступень пускового резистора R д2 и катушку реле КТ З. Это реле, также отсчитав свою выдержку времени, вызовет срабатывание контактора КМ З и шунтирование последней ступени пускового резистора, после чего двигатель выходит на свою естественную характеристику.
После шунтирования третьей ступени пускового резистора начинается ослабление магнитного потока, которое подготавливается включением реле К V З срабатывания КМЗ. В процессе ослабления тока возбуждения с помощью реле управления К V 1 обеспечивается контроль за током якоря. При бросках тока реле К V 1 обеспечивает включение или отключение контактора КМ З, усиливая или ослабляя ток возбуждения, в результате чего ток в якорной цепи не выходит за допустимые пределы. При размыкании контакта КМ 5 часть тока возбуждения замыкается через диод VD и разрядный резистор R р .
Торможение двигателя осуществляется перестановкой рукоятки командоконтроллера S А в нулевое положение. Это приводит к выключению контактора КМ и отключению якоря М от источника питания. Поскольку в процессе пуска двигателя реле динамического торможения К V 2 включилось, замыкание размыкающего контакта КМ в цепи контактора торможения КМ 4 вызовет его включение. Резистор R дт окажется подключенным к якорю М двигателя, который перейдет в режим динамического торможения. При малых частотах вращения двигателя, когда его ЭДС станет ниже напряжения отпускания (удержания) реле К V 2, оно отключится, выключит контактор КМ 4 и процесс торможения закончится. Отметим, что динамическое торможение происходит при полном магнитном потоке.
Для снижения частоты вращения двигателя рукоятка командоконтроллера S А переводится в положения 1 или 2. В положении 1 двигатель работает на искусственной характеристике, соответствующей наличию в цепи якоря резисторов R д2 + R д3 , а в положении 2 -на характеристике, обусловленной резистором R д3 .
Электродвигатели это очень распространенный объект управления в различных устройствах и технических комплексах. Без них наша современная жизнь была бы не такой уж и современной. Они используются во многих сферах потребительской техники и промышленной автоматизации, начиная от небольших двигателей, вращающих барабан стиральной машинки, и заканчивая огромными махинами, приводящими в движение заводские конвейеры и шахтные подъемники.
Традиционно электродвигатели делят на двигатели постоянного тока и двигатели переменного тока . Последние в силу бурного развития научно-технической мысли, которая предлагает более совершенные алгоритмы векторного управления и довольно дешевые и удобные в использовании частотники, приобретают все большую популярность. Но двигатели постоянного тока (ДПТ) тоже имеют свои преимущества, и они еще долгое время будут крутить свои валы в режиме нещадной эксплуатации в различных технических областях, поэтому сегодня речь пойдет именно о ДПТ, точнее об управлении коллекторными электродвигателями постоянного тока.
Такие агрегаты были первыми двигателями, нашедшими широкое применение в промышленном оборудовании, и их до сих пор используют там, где требуется невысокая стоимость конечного устройства, простая установка и управление. На роторе этих двигателей располагается обмотка (1 на рисунке 1), а на статоре — электромагниты (2 на рисунке 1). Щеточные контакты (3 на рисунке 1), которые устанавливаются по окружности вала ротора, применяются для переключения полярности напряжения, прикладываемого к обмотке ротора. Они же создают основную проблему эксплуатации коллекторного ДПТ — ненадежность, поскольку претерпевают сильный износ и требуют периодической замены. Также между щетками и коммутаторными контактами в ходе работы возникают искры, что может привести к возникновению сильных электромагнитных помех. Кроме того, при неправильной эксплуатации всегда имеется риск создать электрическую дугу в коллекторе или, как еще это называют, круговой огонь. В этом случае якорь двигателя гарантированно отживает свой срок.

Рисунок 1 - двигатель постоянного тока
Сегодня получили распространение две схемы управления двигателем такого типа: генератор-двигатель (Г-Д) и преобразователь-двигатель (тиристорный ТП-Д и транзисторный ТрП-Д).

Рисунок 2 - силовые схемы электроприводов постоянного тока а) Г-Д, б) ТП-Д или ТрП-Д
На рисунке 2 показаны две схемы управления ДПТ с независимым возбуждением. В обоих случаях управление угловой скоростью и моментом по абсолютному значению и направлению осуществляют путем регулирования напряжения на якоре двигателя. Напряжение на якоре двигателя Д в системе Г-Д регулируют путем изменения силы тока в обмотке возбуждения генератора (ВГ). Для этой цели служит возбудитель генератора ВГ, в качестве которого используют силовые магнитные усилители (системы МУ-Г-Д, хотя это прошлый век, и в современных системах такого не встретишь), тиристорные (ТВ-Г-Д) или транзисторные (ТрВ-Г-Д) преобразователи. В системах ТП-Д напряжение на якоре двигателя регулируют путем фазового управления коммутацией тиристоров, а в системах ТрП-Д путем изменения скважности пульсирующего питающего напряжения, то есть с помощью широтно-импульсной модуляции (ШИМ).
Популярность Г-Д, а также ТП-Д с каждым годом падает из-за их громоздкости, аппаратной избыточности и сложности в управлении, по сути, они в основном применяются в промышленности для управления крупными двигателями.А ТрП-Д все чаще применяется в различных технических системах благодаря своей простоте, дешевизне и удобству управления. Также за счет обилия на рынке различных моделей MOSFET и IGBT-транзисторов и драйверов управления их затворами системы ТрП-Д применяются для управления как маломощными, так и крупными двигателями. Думаю, это стоит того, чтобы познакомиться с такими системами ближе.
Итак, сердцем ТрП-Д является широтно-импульсный преобразователь (ШИП), который состоит из четырех транзисторов (рисунок 3). В диагональ такого транзисторного моста включается нагрузка, то есть якорь двигателя. Питается ШИП от источника постоянного тока.

Рисунок 3 - схема транзисторного ШИП
Есть несколько способов управления ШИП по цепи якоря. Самый простой - это симметричный способ . При таком управлении в состоянии переключения находятся все четыре транзистора, и выходное напряжение ШИП представляет собой знакопеременные импульсы, длительность которых регулируется входным сигналом. Сам принцип переключения показан на рисунке 4. Логично предположить, если относительная продолжительность включения будет равна 50%, то на выходе ШИП получим 0 В. Преимуществом симметричного способа является простота реализации, но двухполярное напряжение на нагрузке, вызывающее пульсации тока в якоре, является его недостатком. По сути, он используется для управления маломощными ДПТ.

Рисунок 4 - симметричный способ управления ДПТ
Более совершенным является . Как мы видим на рисунке 5, он обеспечивает на выходе ШИП однополярное напряжение. В данном случае переключаются лишь два транзистора Т3 и Т4, при этом Т1 постоянно открыт, а Т2 постоянно закрыт. Для того, чтобы среднее напряжение на выходе ШИП было равно нулю, достаточно чтобы нижний переключающийся транзистор оставался в закрытом состоянии. Такой подход тоже не очень хорош тем, что верхние ключи загружены по току больше, чем нижние. При больших нагрузках это может привести к перегреву и выходу транзисторов из строя.

Рисунок 5 - несимметричный способ управления ДПТ
Но и с этим недостатком справились, придумав способ поочередного управления (рисунок 6). Здесь как при движении как в одну сторону, так и в другую будут переключаться все четыре транзистора. Обязательным условием является нахождение в противофазе управляющих напряжений транзисторов Т1 и Т2 для одной группы и Т3 и Т4 для другой.

Рисунок 6 - поочередный способ управления ДПТ
Из рисунка видим, что при определенном знаке сигнала задания на скорость длинные импульсы с разницей в полпериода подаются на диагонально противоположные ключи (в данном случае Т1 и Т4). Соответственно, также со сдвигом полпериода на ключи противоположной диагонали подаются короткие импульсы. Таким образом, нагрузка подключается к источнику во время отсутствия коротких импульсов, а во время их присутствия закорачивается либо на питание, либо на землю. При изменении знака задания транзисторы управляются противоположным образом.
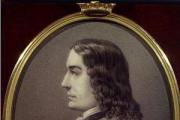
История рода Юсуповых Согласно документам, биография княжеского рода уходит корнями в Багдадский халифат X века, где...
Георгий Блюмин, доктор технических наук, профессор культурологии, президент Юсупово-Княжеского благотворительного фонда...

Которые должны произойти в 2017 году. Он содержит данные по Солнцу, Луне, большим планетам, кометам и астероидам,...

© "Наша Версия", 28.05.2007Пиар-актив Почему ведущие российские партии меняют политтехнологов перед битвой за Госдуму...

10–11-е классы Информационная обработка текста в старших классах (ЗАДАНИЕ А27) В экзаменационную работу по русскому...
Какие звуки называют согласными? Из чего состоит согласный звук? Какими бывают согласные звуки? Сколько в русском...

Увы и ах! Сама идея отведать чьи-нибудь семенники большинству людей кажется абсурдной. Что?! Я?! Яйца?! Да ни в...

Пожалела, что раньше не пробовала эти традиционные Американские пирожные. Готовятся они очень быстро, и...

Предсказание попало в мою жизненную ситуацию! Вот это да! Предсказание Ванги по дате рождения человека...

К чему снится сом? Его появление во сне довольно знаменательное событие. Оно может предвещать перемены или...

Врачи не устают повторять, что ожирение - настоящая война, где только один враг, но при этом бесчисленное...

Много конфет во сне – символ приятных событий, детской безудержной радости и беззаботности. Сонник напоминает,...

Многие из нас любили качаться на качелях. Иногда они снятся нам во снах, напоминая о беззаботном детстве....

Быстрый шоколадный соус из какао, который идеально подходит для всевозможных блинчиков, толстых вафель и...
Георгий Блюмин, доктор технических наук, профессор культурологии, президент Юсупово-Княжеского...
Которые должны произойти в 2017 году. Он содержит данные по Солнцу, Луне, большим планетам, кометам и...