หกเหลี่ยมปกติ
ด้วยคำถาม: "จะหาพื้นที่ของรูปหกเหลี่ยมได้อย่างไร" , คุณสามารถพบไม่เพียง แต่ในการสอบในเรขาคณิต ฯลฯ ความรู้นี้ ...
แผนผังแสดงลูกตุ้มคว่ำบนรถเข็น แท่งไม่มีมวล มวลของเกวียนและมวลของลูกบอลที่ปลายคัน แทนด้วย เอ็มและ ม... ด้ามยาว l.
ลูกตุ้มคว่ำเป็นลูกตุ้มที่มีจุดศูนย์กลางมวลอยู่เหนือจุดศูนย์กลาง ติดกับปลายแท่งแข็ง บ่อยครั้งจุดศูนย์กลางถูกยึดไว้กับเกวียนที่สามารถเคลื่อนที่ในแนวนอนได้ ในขณะที่ลูกตุ้มปกติห้อยลงมาอย่างต่อเนื่อง ลูกตุ้มย้อนกลับจะไม่เสถียรโดยเนื้อแท้และต้องสมดุลอย่างต่อเนื่องเพื่อให้ตั้งตรงโดยใช้แรงบิดไปที่จุดหมุนหรือโดยการย้ายเดือยในแนวนอนโดยเป็นส่วนหนึ่งของระบบป้อนกลับ การสาธิตที่ง่ายที่สุดคือการปรับสมดุลดินสอบนปลายนิ้วของคุณ
ลูกตุ้มคว่ำเป็นปัญหาคลาสสิกในทฤษฎีไดนามิกและการควบคุม และมีการใช้กันอย่างแพร่หลายในการอ้างอิงสำหรับการทดสอบอัลกอริธึมการควบคุม (ตัวควบคุม PID, โครงข่ายประสาทเทียม, การควบคุมแบบคลุมเครือ ฯลฯ)
ปัญหาลูกตุ้มเกี่ยวข้องกับการชี้นำขีปนาวุธ เนื่องจากมอเตอร์จรวดอยู่ต่ำกว่าจุดศูนย์ถ่วง ทำให้เกิดความไม่เสถียร ปัญหาเดียวกันนี้ได้รับการแก้ไขแล้ว ตัวอย่างเช่น ในเซกเวย์ ซึ่งเป็นอุปกรณ์ขนส่งแบบสมดุลในตัวเอง
อีกวิธีหนึ่งในการทำให้ลูกตุ้มมีเสถียรภาพคือการแกว่งฐานอย่างรวดเร็วในระนาบแนวตั้ง ในกรณีนี้ สามารถให้ข้อเสนอแนะได้ หากการแกว่งนั้นแรงเพียงพอ (ในแง่ของขนาดของความเร่งและแอมพลิจูด) ลูกตุ้มย้อนกลับก็จะเสถียรได้ หากจุดเคลื่อนที่สั่นตามการสั่นของฮาร์มอนิกอย่างง่าย การเคลื่อนที่ของลูกตุ้มจะถูกอธิบายโดยฟังก์ชันมาติเยอ
สมการการเคลื่อนที่คล้ายกับลูกตุ้มตรง เว้นแต่เครื่องหมายของตำแหน่งเชิงมุมจะวัดจากตำแหน่งแนวตั้งของสมดุลที่ไม่เสถียร:
θ ¨ - g ℓ sin θ = 0 (\ displaystyle (\ ddot (\ theta)) - (g \ over \ ell) \ sin \ theta = 0)เมื่อโอนแล้วจะมีเครื่องหมายความเร่งเชิงมุมเหมือนกัน:
θ ¨ = g ℓ sin θ (\ displaystyle (\ ddot (\ theta)) = (g \ over \ ell) \ sin \ theta)ดังนั้นลูกตุ้มย้อนกลับจะเร่งจากสมดุลที่ไม่เสถียรแนวตั้งในทิศทางตรงกันข้าม และความเร่งจะเป็นสัดส่วนผกผันกับความยาว ลูกตุ้มสูงตกช้ากว่าลูกเตี้ย
สมการการเคลื่อนที่หาได้จากสมการลากรองจ์ เรากำลังพูดถึงรูปข้างบน โดยที่ θ (t) (\ displaystyle \ theta (t))ความยาวมุมลูกตุ้ม ล. (\ displaystyle ล.)สัมพันธ์กับแนวดิ่งและแรงกระทำของแรงโน้มถ่วงและแรงภายนอก F (\ displaystyle F)ในทิศทาง x (\ displaystyle x)... เรากำหนด x (t) (\ displaystyle x (t))ตำแหน่งของรถเข็น Lagrangian L = T - V (\ displaystyle L = T-V)ระบบ:
L = 1 2 M v 1 2 + 1 2 mv 2 2 - mg ℓ cos θ (\ displaystyle L = (\ frac (1) (2)) Mv_ (1) ^ (2) + (\ frac (1) (2)) mv_ (2) ^ (2) -mg \ ell \ cos \ theta)ความเร็วของเกวียนอยู่ที่ไหนและคือความเร็วของจุดวัสดุ ม. (\ displaystyle ม.). v 1 (\ displaystyle v_ (1))และ v 2 (\ displaystyle v_ (2))สามารถแสดงในรูปของ x (\ displaystyle x)และ θ (\ displaystyle \ theta)โดยบันทึกความเร็วเป็นอนุพันธ์อันดับหนึ่งของตำแหน่ง
v 1 2 = x ˙ 2 (\ displaystyle v_ (1) ^ (2) = (\ dot (x)) ^ (2)) v 2 2 = (ddt (x - ℓ sin θ)) 2 + (ddt (ℓ cos θ)) 2 (\ displaystyle v_ (2) ^ (2) = \ left ((\ frac (d)) (dt )) (\ left (x- \ ell \ sin \ theta \ right)) \ right) ^ (2) + \ left ((\ frac (d) (dt)) (\ left (\ ell \ cos \ theta \ ขวา)) \ ขวา) ^ (2))ลดความซับซ้อนของนิพจน์ v 2 (\ displaystyle v_ (2))นำไปสู่:
v 2 2 = x ˙ 2 - 2 ℓ x ˙ θ ˙ cos θ + ℓ 2 θ ˙ 2 (\ displaystyle v_ (2) ^ (2) = (\ dot (x)) ^ (2) -2 \ ell (\ dot (x)) (\ dot (\ theta)) \ cos \ theta + \ ell ^ (2) (\ dot (\ theta)) ^ (2))Lagrangian ถูกกำหนดโดยสูตร:
L = 1 2 (M + m) x ˙ 2 - m ℓ x ˙ θ ˙ cos θ + 1 2 m ℓ 2 θ ˙ 2 - mg ℓ cos θ (\ displaystyle L = (\ frac (1) (2 )) \ left (M + m \ right) (\ dot (x)) ^ (2) -m \ ell (\ dot (x)) (\ dot (\ theta)) \ cos \ theta + (\ frac ( 1) (2)) m \ ell ^ (2) (\ dot (\ theta)) ^ (2) -mg \ ell \ cos \ theta)และสมการการเคลื่อนที่:
ddt ∂ L ∂ x ˙ - ∂ L ∂ x = F (\ displaystyle (\ frac (\ mathrm (d)) (\ mathrm (d) t)) (\ บางส่วน (L) \ เกิน \ บางส่วน (\ dot (x ))) - (\ บางส่วน (L) \ เกิน \ บางส่วน x) = F) ddt ∂ L ∂ θ ˙ - ∂ L ∂ θ = 0 (\ displaystyle (\ frac (\ mathrm (d)) (\ mathrm (d) t)) (\ บางส่วน (L) \ เกิน \ บางส่วน (\ dot (\ theta))) - (\ บางส่วน (L) \ มากกว่า \ บางส่วน \ theta) = 0)การแทน L (\ displaystyle L)ในนิพจน์เหล่านี้ด้วยการทำให้เข้าใจง่ายที่ตามมาจะนำไปสู่สมการที่อธิบายการเคลื่อนที่ของลูกตุ้มส่วนกลับ:
(M + m) x ¨ - m ℓ θ ¨ cos θ + m ℓ θ ˙ 2 sin θ = F (\ displaystyle \ left (M + m \ right) (\ ddot (x)) - m \ ell ( \ ddot (\ theta)) \ cos \ theta + m \ ell (\ dot (\ theta)) ^ (2) \ sin \ theta = F) ℓ θ ¨ - g sin θ = x ¨ cos θ (\ displaystyle \ ell (\ ddot (\ theta)) - g \ sin \ theta = (\ ddot (x)) \ cos \ theta)สมการเหล่านี้ไม่เป็นเชิงเส้น แต่เนื่องจากเป้าหมายของระบบควบคุมคือการถือลูกตุ้มในแนวตั้ง สมการจึงสามารถทำให้เป็นเส้นตรงได้โดยใช้ θ ≈ 0 (\ displaystyle \ theta \ ประมาณ 0).
สมการการเคลื่อนที่ของลูกตุ้มดังกล่าวสัมพันธ์กับฐานการสั่นแบบไม่มีมวล และได้รับในลักษณะเดียวกับลูกตุ้มบนรถเข็น ตำแหน่งของจุดวัสดุถูกกำหนดโดยสูตร:
(- ℓ sin θ, y + ℓ cos θ) (\ displaystyle \ left (- \ ell \ sin \ theta, y + \ ell \ cos \ theta \ right))และพบความเร็วผ่านตำแหน่งอนุพันธ์อันดับแรก:
v 2 = y ˙ 2 - 2 ℓ y ˙ θ ˙ บาป θ + ℓ 2 θ ˙ 2 (\ displaystyle v ^ (2) = (\ dot (y)) ^ (2) -2 \ ell (\ dot (y)) (\ dot (\ theta)) \ sin \ theta + \ ell ^ (2) (\ dot (\ theta)) ^ (2).)Lagrangian สำหรับระบบนี้สามารถเขียนได้ดังนี้:
L = 1 2 m (y ˙ 2 - 2 ℓ y ˙ θ ˙ sin θ + ℓ 2 θ ˙ 2) - mg (y + ℓ cos θ) (\ displaystyle L = (\ frac (1) (2) ) m \ left ((\ dot (y)) ^ (2) -2 \ ell (\ dot (y)) (\ dot (\ theta)) \ sin \ theta + \ ell ^ (2) (\ dot ( \ theta)) ^ (2) \ right) -mg \ left (y + \ ell \ cos \ theta \ right))สมการการเคลื่อนที่ตามมาจาก:
ddt ∂ L ∂ θ ˙ - ∂ L ∂ θ = 0 (\ displaystyle (\ mathrm (d) \ over \ mathrm (d) t) (\ บางส่วน (L) \ เกิน \ บางส่วน (\ dot (\ theta))) - (\ บางส่วน (L) \ มากกว่า \ บางส่วน \ theta) = 0) 1งานนี้ทุ่มเทให้กับปัญหาการรักษาเสถียรภาพของลูกตุ้มคว่ำ ซึ่งได้รับความสนใจอย่างมากในทฤษฎีการควบคุม เนื่องจากอัลกอริธึมสำหรับการรักษาตำแหน่งแนวตั้งของอุปกรณ์ทางเทคนิคของมนุษย์สร้างขึ้นโดยใช้ตัวอย่างของระบบที่ไม่เสถียรนี้ บทความนี้อธิบายกลยุทธ์ในการนำลูกตุ้มย้อนกลับมาอยู่ในตำแหน่งที่ไม่เสถียรในแนวตั้ง โดยพัฒนาระบบป้องกันภาพสั่นไหวแบบออปโตเชิงกลสำหรับลูกตุ้มถอยหลัง ซึ่งประกอบด้วยขาตั้งสำหรับห้องปฏิบัติการ TP-802 จาก Festo และอุปกรณ์ควบคุมการเคลื่อนไหว แสดงให้เห็นว่าหลังจากที่ลูกตุ้มถูกนำไปยังตำแหน่งบนสุดสุด ระบบกันสั่นจะจับลูกตุ้มไว้ในตำแหน่งนี้โดยเลื่อนแคร่ตลับหมึกตามจำนวนขั้นที่กำหนด ขึ้นอยู่กับมุมเอียงของลูกตุ้ม อัลกอริธึมได้รับการพัฒนาเพื่อให้ลูกตุ้มอยู่ในตำแหน่งสมดุลที่ไม่เสถียรและการถือในตำแหน่งนี้ในภายหลัง เช่นเดียวกับซอฟต์แวร์ที่เกี่ยวข้อง
ลูกตุ้มย้อนกลับ
สมดุล
เสถียรภาพ
ข้อเสนอแนะ
อัลกอริทึม
ตัวส่งสัญญาณภาพ
ไมโครโปรเซสเซอร์
ซอฟต์แวร์
1. ป.ล. เสถียรภาพแบบไดนามิกของลูกตุ้มที่จุดระงับการสั่น // ZhETF - พ.ศ. 2494 - ลำดับที่ 21 - หน้า 588-597.
2. ป.ล. ลูกตุ้มที่มีระบบกันสะเทือนแบบสั่น // Phys. - พ.ศ. 2494 - ลำดับที่ 44. - หน้า 7–20.
3. Kuznetsov V.P. , Ivanov A.A. , Kudryashov B.P. การออกแบบเครื่องมือสำหรับวัดพารามิเตอร์ของวัตถุทางเทคโนโลยีโดยใช้ตัวแปลงไฟเบอร์ออปติก: บทช่วยสอน - Kurgan: สำนักพิมพ์ของรัฐ Kurgan มหาวิทยาลัย, 2556 .-- 84 น.
4. Makarov A.V. , Kuzyakov O.N. อุปกรณ์สำหรับควบคุมการเคลื่อนไหว // สิทธิบัตรของรัสเซีย №2150086 - 2000. - บุล. ลำดับที่ 15
5. Formalsky A.M. การรักษาเสถียรภาพของลูกตุ้มคว่ำด้วยจุดแขวนลอยคงที่หรือเคลื่อนที่ได้ // Dokl - 2549. - เล่ม 406 ฉบับที่ 2 - หน้า 175-179.
6. Ashish S. Katariya ตัวควบคุมการป้อนกลับและผลป้อนกลับของสถานะที่เหมาะสมที่สุดสำหรับระบบลูกตุ้มคว่ำแบบมีล้อ สถาบันเทคโนโลยีจอร์เจีย, 2010 .-- 72 หน้า
7. Bradshaw A. , Shao J. การควบคุมระบบลูกตุ้มคว่ำ // Robotica. - 2539. - ฉบับ. 14. - หน้า 397-405.
8. Bugeja M. การแกว่งขึ้นแบบไม่เชิงเส้นและการควบคุมเสถียรภาพของระบบลูกตุ้มคว่ำ, Proc. ของ. ยูโรคอน, ลูบลิยานา. - พ.ศ. 2546
9. ระบบกำหนดตำแหน่ง ตัวควบคุมตำแหน่งอัจฉริยะ SPC200 คู่มือ. เฟสโต้ เอจี แอนด์ โค KG, ฝ่าย. KI-TD. - 2548 .-- 371 น.
10. SPC200 ตัวควบคุมตำแหน่งอัจฉริยะ แพ็คเกจซอฟต์แวร์ WinPISA เฟสโต้ เอจี แอนด์ โค กิโลกรัม. - 2548 .-- 381 น.
ปัญหาในการควบคุมวัตถุประเภทลูกตุ้มเป็นพื้นฐานสำหรับสาขาวิทยาศาสตร์จำนวนหนึ่ง เนื่องจากการแก้ปัญหาสะท้อนให้เห็นในทฤษฎีการควบคุมอัตโนมัติ วิทยาการหุ่นยนต์ และถูกนำมาใช้ในการสร้างแบบจำลองเครื่องบิน ในการแก้ปัญหาการรักษาเสถียรภาพตำแหน่งของวัตถุบนโทรศัพท์มือถือ แพลตฟอร์มในการพัฒนายานพาหนะพิเศษ - เซกเวย์ ฯลฯ
ลูกตุ้มกายภาพเป็นหนึ่งในแบบจำลองทางกายภาพที่ง่ายที่สุดและพบบ่อยที่สุด ซึ่งเป็นการแกว่งของน้ำหนักบนเกลียวที่ขยายไม่ได้หรือแกนแข็ง กรณีพิเศษของระบบดังกล่าวคือลูกตุ้มย้อนกลับ ซึ่งเป็นวัตถุทางกายภาพที่ไม่เสถียรโดยมีตำแหน่งสมดุลสองตำแหน่ง: ที่จุดล่างและจุดบน ในกรณีนี้ การก่อกวนใดๆ ที่มีขนาดเล็กตามอำเภอใจสามารถนำลูกตุ้มออกจากตำแหน่งสมดุลบน ตามด้วยแนวโน้มที่จะเคลื่อนไปยังตำแหน่งสมดุลล่าง เพื่อให้ลูกตุ้มคงที่ที่จุดบนสุด ระบบสามารถเสริมด้วยองค์ประกอบต่างๆ ที่ให้ผลป้อนกลับ ซึ่งเป็นส่วนประกอบที่จำเป็นของระบบควบคุม
งานนี้อุทิศให้กับการแก้ปัญหาการรักษาเสถียรภาพของตำแหน่งบนสำหรับลูกตุ้มคว่ำ โมเดลระบบแสดงโดยสมการต่อไปนี้:
โดยที่ m คือมวลของลูกตุ้ม l คือความยาวของการแขวนของลูกตุ้ม J คือโมเมนต์ความเฉื่อยของลูกตุ้ม θ คือมุมเอียงของลูกตุ้มจากแนวตั้ง a - การเร่งความเร็วของการเคลื่อนที่ของจุดระงับของลูกตุ้ม (แคร่); g คือความเร่งของแรงโน้มถ่วง หลังจากแปลงร่างแล้วจะได้
ดังนั้น พารามิเตอร์ต่อไปนี้จึงส่งผลต่อการเคลื่อนที่ของระบบ: มวลและความยาวของการระงับของลูกตุ้มและความเร่งของการเคลื่อนที่ของจุดแขวนลอย - แคร่
คำอธิบายการทำงานของระบบ
ในงานนี้ งานถูกกำหนดให้จำลองกระบวนการนำลูกตุ้มไปยังตำแหน่งบนสุดด้วยการรักษาเสถียรภาพของตำแหน่งนี้ในภายหลัง เมื่อใช้ห้องปฏิบัติการ TP-802 สแตนด์จาก Festo (ประเทศเยอรมนี) เป็นผู้ริเริ่มตำแหน่งบนสุดของ ลูกตุ้ม ตลอดจนส่วนประกอบอื่นๆ ที่ใช้สำหรับระบบป้องกันภาพสั่นไหวที่สร้างขึ้น
1.กลยุทธ์ในการนำลูกตุ้มไปอยู่ในตำแหน่งยอดดุลสูงสุด
เห็นได้ชัดว่าความเป็นไปได้ในการนำลูกตุ้มไปยังตำแหน่งสมดุลบนสุดถูกจำกัดโดยพารามิเตอร์ (โดยเฉพาะ ความยาวของไดรฟ์และความเร่งสูงสุดของการเคลื่อนที่ของแคร่) ของม้านั่งในห้องปฏิบัติการ Festo TR-802 บนพื้นฐานของ ซึ่งงานกำลังได้รับการแก้ไข ดังนั้น ความเร่งสูงสุดของรถม้าคือ a = 4m / s2
โดยการคำนวณทางคณิตศาสตร์ พบว่าค่าธรณีประตูของการเร่งความเร็วของการเคลื่อนที่ของลูกตุ้มซึ่งกำหนดจำนวนการเปลี่ยนแปลงที่ต้องการโดยทิศทางการเคลื่อนที่ของมันคือ a0 = 13.1 m / s2 เนื่องจากเมื่อใช้ม้านั่งในห้องปฏิบัติการ Festo TP-802 ค่านี้จึงสูงกว่าค่าสูงสุดของการเร่งความเร็วของแคร่ที่เป็นไปได้มาก ในงานนี้เราใช้กลยุทธ์ในการถอนลูกตุ้มลูกสูบซึ่งทิศทางการเคลื่อนที่ของแคร่เปลี่ยนหลายครั้ง และการเคลื่อนตัวของแคร่ตลับหมึกจากตำแหน่งปัจจุบันเพิ่มขึ้น
2. คำอธิบายทางคณิตศาสตร์ของการนำลูกตุ้มไปยังตำแหน่งบนสุด
เป็นที่ทราบกันว่าสำหรับลูกตุ้มที่จะไปถึงตำแหน่งสมดุลบน พลังงานศักย์ของมันจะต้องไปถึงค่า Ep = 2mpgl โดยที่ mp คือมวลของลูกตุ้ม l คือความยาวของลูกตุ้ม g คือความเร่งของแรงโน้มถ่วง มันถูกนำมาพิจารณาว่า mp = 0.06kg, l = 0.25m, g = 10m / s2 ดังนั้น ในการแก้ปัญหาที่วางไว้ พลังงานศักย์ของลูกตุ้มจะต้องเท่ากับ Ep = 0.3 J
มีการตัดสินใจว่าการแกว่งของลูกตุ้มจะดำเนินการดังนี้: ไดรฟ์ระบบเครื่องกลไฟฟ้าเลื่อนแคร่ที่สัมพันธ์กับตำแหน่งเริ่มต้นด้วยจำนวนขั้นคงที่ อันดับแรกไปในทิศทางลบ จากนั้นไปในทิศทางบวก ปริมาณออฟเซ็ตจากตำแหน่งเริ่มต้นจะเพิ่มขึ้นทุกครั้งที่แคร่ตลับหมึกเคลื่อนไปในทิศทางใดทิศทางหนึ่ง เพื่อให้ลูกตุ้มอยู่ในตำแหน่งสมดุลบนสุด อัลกอริทึมได้รับการพัฒนาดังแสดงในรูปที่ 1 ในกรณีนี้ เป็นที่ยอมรับ: (1) แคร่ตลับหมึกเคลื่อนไปตามแกน Ox ระหว่างจุด X = 0 มม. และ X = 300 มม. (2) ตำแหน่งเริ่มต้นของแคร่ - พิกัด X = 150 มม. (3) N คือค่า (เป็นมม.) ของการเคลื่อนที่ของแคร่ตลับหมึกจากตำแหน่งเริ่มต้น (4) K คือส่วนเพิ่มที่ระบุ (เป็นมม.) ของการกระจัดของแคร่ตลับหมึกจากตำแหน่งนี้
โดยคำนึงถึงว่าเมื่อรถม้าที่มีลูกตุ้มติดอยู่เคลื่อนที่ไปตามแกนนอน พลังงานจลน์ของการเคลื่อนที่ของรถม้า Eк จะถูกแปลงเป็นพลังงานศักย์ของการเคลื่อนที่ของลูกตุ้ม Ep จึงสามารถคำนวณอัตราขยายพลังงานของลูกตุ้มได้ . สมมติว่าค่าการเคลื่อนตัวของแคร่ตลับหมึกจากตำแหน่งเริ่มต้นเท่ากับ N = 50 มม. ค่าของส่วนเพิ่มที่ระบุของการกระจัดของแคร่ตลับหมึกจากตำแหน่งเริ่มต้นคือ K = 50 มม. จากนั้นค่าพลังงานศักย์ของลูกตุ้มหลังจากการกระจัดครั้งแรกของแคร่
หลังจากที่สอง -
![]()
ดังนั้นหลังจากการเคลื่อนที่สามครั้งของแคร่ตลับหมึก พลังงานศักย์ของลูกตุ้มจะต้องเกินค่าที่จำเป็นในการนำพาไปยังตำแหน่งสมดุลบน
3. อัลกอริธึมในการนำลูกตุ้มไปตำแหน่งบนสุด
ในทางปฏิบัติ ปรากฎว่าข้อสรุปที่วาดในย่อหน้าก่อนหน้า โดยคำนึงถึงการเปลี่ยนแปลงของพลังงานจลน์ของการขนส่งไปเป็นพลังงานศักย์ของลูกตุ้ม ไม่สอดคล้องกับข้อมูลการทดลอง พลังงานส่วนใหญ่ถูกใช้ไปในสิ่งแวดล้อมเนื่องจากความไม่สมบูรณ์ในการออกแบบ ความเสียดทานของแคร่ตลับหมึก และการระงับของลูกตุ้ม
ดังนั้นวัตถุทางกายภาพของการควบคุมคือลูกตุ้มย้อนกลับที่นำไปยังตำแหน่งที่ไม่เสถียรบนสุดสำหรับการเคลื่อนที่ในจำนวนที่ จำกัด ของการขนส่งของไดรฟ์ไฟฟ้าที่ขับเคลื่อนด้วยสเต็ปปิ้งมอเตอร์ MTR-ST ซึ่งควบคุมโดยคอมพิวเตอร์พีซีผ่าน SPC -200 ตัวควบคุมตำแหน่งพิกัด การเริ่มต้นการทำงานของระบบรักษาเสถียรภาพสำหรับตำแหน่งของลูกตุ้มย้อนกลับตามการถอนลูกตุ้มไปยังตำแหน่งบนสุด เพื่อแก้ปัญหานี้โดยคำนึงถึงอัลกอริทึมที่แสดงในรูปที่ 1 และโปรแกรมแอปพลิเคชันที่เกี่ยวข้องสำหรับการวางตำแหน่งแคร่ตลับหมึก สันนิษฐานว่า N คือการเคลื่อนที่ของแคร่ตลับหมึกจากศูนย์กลางของแกนขับเคลื่อน และ K คือการเพิ่มขึ้นที่ระบุในการกระจัดของแคร่ตลับหมึกจากศูนย์กลางของแกนขับเคลื่อน

ข้าว. 1. อัลกอริธึมของรูทีนย่อยสำหรับการนำลูกตุ้มไปที่ตำแหน่งบน
รายการโปรแกรมสำหรับนำลูกตุ้มไปยังตำแหน่งบนสุด ที่พัฒนาขึ้นระหว่างการทดลองกับระบบ "carrier-pendulum" โดยใช้ซอฟต์แวร์แอพพลิเคชั่น Festo WinPisa 4.41 แสดงไว้ด้านล่าง ความคิดเห็นที่อธิบายรหัสโปรแกรมจะได้รับตรงข้ามกับบรรทัดที่เกี่ยวข้องหลังเครื่องหมาย ";"

เมื่อเริ่มโปรแกรม แคร่ตลับหมึกจะเคลื่อนไปที่กึ่งกลางของแกนไดรฟ์ โปรแกรม 9 บรรทัดถัดไปสอดคล้องกับการแกว่งที่เพิ่มขึ้นของลูกตุ้ม หลังจากนั้นแคร่ตลับหมึกจะเคลื่อนที่อีก 2 ครั้งเพื่อให้ลูกตุ้มมีเสถียรภาพในช่วงเวลาสั้นๆ ที่จุดบน
ทันทีที่ลูกตุ้มไปถึงตำแหน่งสมดุลบน การควบคุมการเคลื่อนที่โดยระบบ "แคร่เลื่อน - ลูกตุ้ม" จะถูกโอนไปยังระบบรักษาเสถียรภาพที่พัฒนาขึ้น
4.การทำงานระบบรักษาเสถียรภาพ
องค์ประกอบที่สำคัญอย่างหนึ่งของระบบนี้คืออุปกรณ์ควบคุมการเคลื่อนที่ด้วยแสงที่อธิบายไว้ในงาน โครงสร้างของระบบแสดงในรูปที่ 2
บนฐานนิ่ง1 มีแคร่3เคลื่อนที่ไปตามแกน X ซึ่งลูกตุ้ม7 ที่มีโหลด8 ที่มีหม้อน้ำ9 ได้รับการแก้ไขแล้ว แคร่ตลับหมึกเชื่อมต่อกับสเต็ปปิ้งมอเตอร์อย่างแน่นหนา4 โดยใช้ไดรฟ์แบบลิเนียร์ไฟฟ้า2 สเต็ปเปอร์มอเตอร์4 ถูกควบคุมผ่านตัวควบคุมมอเตอร์5 โดยตัวควบคุมตำแหน่ง6 คอมพิวเตอร์ 14 ควบคุมการทำงานของอีซีแอล 9 และตัวถอดรหัส 13 ไปยังอินพุตที่ได้รับสัญญาณจากตัวตรวจจับแสง 10, 11, 12 ซึ่งมีอุปกรณ์สำหรับแปลงเป็นค่าปัจจุบันและเอาต์พุตเชื่อมต่อกับ คอมพิวเตอร์ 14. ในกรณีนี้ photodetector 10 จะอยู่ตรงกลางและสร้างสัญญาณที่เอาต์พุตก็ต่อเมื่อลูกตุ้มย้อนกลับอยู่ในตำแหน่งแนวตั้ง (จุดสูงสุด)
ระบบทำงานดังนี้: ลูกตุ้ม7 ถูกนำไปยังตำแหน่งสมดุลที่ไม่เสถียรด้านบนสุดสำหรับการเคลื่อนที่จำนวนจำกัดของตัวขับเคลื่อนระบบเครื่องกลไฟฟ้าที่ควบคุมโดยสเต็ปปิ้งมอเตอร์5 และระยะการเดินทางสูงสุดของแคร่ตลับหมึกคือ 300 มม. ตัวปล่อยแสง 9 จับจ้องอยู่ที่โหลดของลูกตุ้ม 8 ถูกเปิดขึ้นตั้งแต่ตอนที่ลูกตุ้ม 7 เริ่มเคลื่อนขึ้นด้านบน และสัญญาณจะถูกสร้างขึ้นบนเครื่องตรวจจับแสง 10 ในขณะที่ตำแหน่งแนวตั้งของลูกตุ้ม 7 ซึ่งถูกป้อน ผ่านตัวถอดรหัส 13 ไปยังคอมพิวเตอร์ 14 และได้รับการแก้ไขโดยทางโปรแกรม ซึ่งสอดคล้องกับตำแหน่งบนสุดของลูกตุ้ม ภายใต้อิทธิพลของแรงทางกายภาพ ลูกตุ้มไม่สามารถอยู่ในตำแหน่งนี้เป็นเวลานานและเริ่มเบี่ยงเบน เมื่อลูกตุ้มเบี่ยงเบนไปจากแนวตั้ง ทิศทางของแสงของตัวปล่อยภาพถ่ายจะเปลี่ยนไป ซึ่งเครื่องตรวจจับภาพถ่ายจะบันทึก ตามที่ตัวตรวจจับแสงที่ใกล้เคียงที่สุดซึ่งสัมพันธ์กับตัวตรวจจับแสง10 เป็นคนแรกที่ลงทะเบียนสัญญาณอีซีแอล (Lc หรือ Pc) เป็นไปได้ที่จะกำหนดพิกัดของลูกตุ้ม (มุมเบี่ยงเบนของลูกตุ้มจากแนวตั้ง) และทิศทางของ การโก่งตัว จำนวนเครื่องตรวจจับแสงและขั้นตอนของการสลับโดยตรงขึ้นอยู่กับความแม่นยำในการวัดที่ต้องการ
ภายใต้อิทธิพลของแรงทางกายภาพ ลูกตุ้มไม่สามารถอยู่ในตำแหน่งนี้เป็นเวลานานและเริ่มเบี่ยงเบน เมื่อลูกตุ้มเบี่ยงเบนไปจากแนวตั้ง ทิศทางของแสงของตัวปล่อยภาพถ่ายจะเปลี่ยนไป ซึ่งเครื่องตรวจจับภาพถ่ายจะบันทึก ขึ้นอยู่กับเครื่องตรวจจับแสงที่ใกล้กับเครื่องตรวจจับแสง 10 ก่อนลงทะเบียนสัญญาณอีซีแอล (Lk หรือ Pk) เป็นไปได้ที่จะกำหนดพิกัดของลูกตุ้ม (มุมเบี่ยงเบนของลูกตุ้มจากแนวตั้ง) และทิศทางของการโก่งตัว จำนวนเครื่องตรวจจับแสงและขั้นตอนของการสลับโดยตรงขึ้นอยู่กับความแม่นยำในการวัดที่ต้องการ ข้อมูลเกี่ยวกับตำแหน่งของลูกตุ้ม 7 ถูกส่งจากเครื่องตรวจจับแสงไปยังคอมพิวเตอร์ 14 ซึ่งประมวลผลตามโปรแกรมที่กำหนด บนพื้นฐานของการดำเนินการควบคุมที่ถูกสร้างขึ้นสำหรับตัวควบคุมตำแหน่ง 6: เลื่อนแคร่ไปที่ส่วนเบี่ยงเบนของลูกตุ้ม ตามจำนวนขั้นตอนขึ้นอยู่กับความเบี่ยงเบนของลูกตุ้มจากแนวตั้ง ดังนั้นระบบนี้จึงถูกปิดและทำให้สามารถรักษาเสถียรภาพของลูกตุ้มย้อนกลับในแนวตั้งได้ อัลกอริธึมการทำงานของระบบแสดงในรูปที่ 3

ข้าว. 2. โครงสร้างระบบ

ข้าว. 3. อัลกอริธึมของระบบ
บทสรุป
ดังนั้น ในงานนี้ อัลกอริธึมได้รับการพัฒนาเพื่อนำลูกตุ้มไปยังตำแหน่งสมดุลบนสุดโดยจับที่ตำแหน่งสมดุลแนวตั้ง (ไม่เสถียร) ในภายหลัง การออกแบบที่ไม่สมบูรณ์ของลูกตุ้มทำให้จำเป็นต้องเคลื่อนที่จำนวนมากขึ้นเพื่อนำลูกตุ้มไปยังจุดสูงสุด นอกจากนี้ ยังได้พัฒนาหลักการสร้างระบบออปโตกลไกเพื่อรักษาเสถียรภาพของตำแหน่งของลูกตุ้มส่วนกลับที่จุดสูงสุด ซึ่งประกอบด้วยขาตั้งแบบกลไกทางกลไฟฟ้า TR-802 จาก Festo และอุปกรณ์ควบคุมการเคลื่อนที่ด้วยแสง ตามคำแนะนำ ขอแนะนำให้ใช้ผลลัพธ์ที่ได้จากการพัฒนาระบบตรวจสอบสำหรับวัตถุทางเทคโนโลยีเมื่อเคลื่อนย้ายวัตถุควบคุมการสแกนตามพิกัดสามพิกัด
ลูกตุ้มคว่ำเป็นลูกตุ้มที่มีจุดศูนย์กลางมวลอยู่เหนือจุดศูนย์กลาง ติดกับปลายแท่งแข็ง บ่อยครั้งจุดศูนย์กลางถูกยึดไว้กับเกวียนที่สามารถเคลื่อนที่ในแนวนอนได้ ในขณะที่ลูกตุ้มปกติห้อยลงมาอย่างต่อเนื่อง ลูกตุ้มย้อนกลับจะไม่เสถียรโดยเนื้อแท้และต้องสมดุลอย่างต่อเนื่องเพื่อให้ตั้งตรงโดยใช้แรงบิดไปที่จุดหมุนหรือโดยการย้ายเดือยในแนวนอนโดยเป็นส่วนหนึ่งของระบบป้อนกลับ การสาธิตที่ง่ายที่สุดคือการปรับสมดุลดินสอบนปลายนิ้วของคุณ
ลูกตุ้มคว่ำเป็นปัญหาคลาสสิกในทฤษฎีไดนามิกและการควบคุม และมีการใช้กันอย่างแพร่หลายในการอ้างอิงสำหรับการทดสอบอัลกอริธึมการควบคุม (ตัวควบคุม PID, โครงข่ายประสาทเทียม, การควบคุมแบบคลุมเครือ ฯลฯ)
ปัญหาลูกตุ้มเกี่ยวข้องกับการชี้นำขีปนาวุธ เนื่องจากมอเตอร์จรวดอยู่ต่ำกว่าจุดศูนย์ถ่วง ทำให้เกิดความไม่เสถียร ปัญหาเดียวกันนี้ได้รับการแก้ไขแล้ว ตัวอย่างเช่น ในเซกเวย์ ซึ่งเป็นอุปกรณ์ขนส่งแบบสมดุลในตัวเอง
อีกวิธีหนึ่งในการทำให้ลูกตุ้มมีเสถียรภาพคือการแกว่งฐานอย่างรวดเร็วในระนาบแนวตั้ง ในกรณีนี้ สามารถให้ข้อเสนอแนะได้ หากการแกว่งนั้นแรงเพียงพอ (ในแง่ของขนาดของความเร่งและแอมพลิจูด) ลูกตุ้มย้อนกลับก็จะเสถียรได้ หากจุดเคลื่อนที่สั่นตามการสั่นของฮาร์มอนิกอย่างง่าย การเคลื่อนที่ของลูกตุ้มจะถูกอธิบายโดยฟังก์ชันมาติเยอ
สมการการเคลื่อนที่คล้ายกับลูกตุ้มตรง เว้นแต่เครื่องหมายของตำแหน่งเชิงมุมจะวัดจากตำแหน่งแนวตั้งของสมดุลที่ไม่เสถียร:
texvcไม่พบ; ดูคณิตศาสตร์ / README สำหรับความช่วยเหลือในการตั้งค่า): \ Ddot \ theta - (g \ over \ ell) \ sin \ theta = 0
เมื่อโอนแล้วจะมีเครื่องหมายความเร่งเชิงมุมเหมือนกัน:
ไม่สามารถแยกวิเคราะห์นิพจน์ (Executabletexvcไม่พบ; ดูคณิตศาสตร์ / README สำหรับความช่วยเหลือในการตั้งค่า): \ Ddot \ theta = (g \ over \ ell) \ sin \ theta
ดังนั้นลูกตุ้มย้อนกลับจะเร่งจากสมดุลที่ไม่เสถียรแนวตั้งในทิศทางตรงกันข้าม และความเร่งจะเป็นสัดส่วนผกผันกับความยาว ลูกตุ้มสูงตกช้ากว่าลูกเตี้ย
สมการการเคลื่อนที่หาได้จากสมการลากรองจ์ เรากำลังพูดถึงรูปข้างบน โดยที่ ไม่สามารถแยกวิเคราะห์นิพจน์ (Executable texvcไม่พบ; ดูคณิตศาสตร์ / README สำหรับความช่วยเหลือในการกำหนดค่า): \ Theta (t)ความยาวมุมลูกตุ้ม ไม่สามารถแยกวิเคราะห์นิพจน์ (Executable texvcไม่พบ; ดูคณิตศาสตร์ / README สำหรับความช่วยเหลือในการกำหนดค่า): Lสัมพันธ์กับแนวดิ่งและแรงกระทำของแรงโน้มถ่วงและแรงภายนอก ไม่สามารถแยกวิเคราะห์นิพจน์ (Executable texvcไม่พบ; ดูคณิตศาสตร์ / README สำหรับความช่วยเหลือในการกำหนดค่า): Fในทิศทาง ไม่สามารถแยกวิเคราะห์นิพจน์ (Executable texvc ... เรากำหนด ไม่สามารถแยกวิเคราะห์นิพจน์ (Executable texvcไม่พบ; ดูคณิตศาสตร์ / README สำหรับความช่วยเหลือในการกำหนดค่า): X (t)ตำแหน่งของรถเข็น Lagrangian ไม่สามารถแยกวิเคราะห์นิพจน์ (Executable texvcไม่พบ; ดูคณิตศาสตร์ / README - ความช่วยเหลือในการตั้งค่า): L = T - Vระบบ:
texvcไม่พบ; ดูคณิตศาสตร์ / README สำหรับความช่วยเหลือในการตั้งค่า): L = \ frac (1) (2) M v_1 ^ 2 + \ frac (1) (2) m v_2 ^ 2 - m g \ ell \ cos \ theta
ที่ไหน ไม่สามารถแยกวิเคราะห์นิพจน์ (Executable texvc คือความเร็วของเกวียน และ ไม่สามารถแยกวิเคราะห์นิพจน์ (Executable texvc - ความเร็วของจุดวัสดุ ไม่สามารถแยกวิเคราะห์นิพจน์ (Executable texvcไม่พบ; ดูคณิตศาสตร์ / README สำหรับความช่วยเหลือในการกำหนดค่า): M
.
ไม่สามารถแยกวิเคราะห์นิพจน์ (Executable texvcไม่พบ; ดูคณิตศาสตร์ / README - การอ้างอิงการตั้งค่า): V_1และ ไม่สามารถแยกวิเคราะห์นิพจน์ (Executable texvcไม่พบ; ดูคณิตศาสตร์ / README - การอ้างอิงการตั้งค่า): V_2สามารถแสดงในรูปของ ไม่สามารถแยกวิเคราะห์นิพจน์ (Executable texvcไม่พบ; ดูคณิตศาสตร์ / README - การอ้างอิงการตั้งค่า): Xและ ไม่สามารถแยกวิเคราะห์นิพจน์ (Executable texvcไม่พบ; ดูคณิตศาสตร์ / README สำหรับความช่วยเหลือในการกำหนดค่า): \ Thetaโดยบันทึกความเร็วเป็นอนุพันธ์อันดับหนึ่งของตำแหน่ง
texvcไม่พบ; ดูคณิตศาสตร์ / README สำหรับความช่วยเหลือในการกำหนดค่า): V_1 ^ 2 = \ dot x ^ 2
ไม่สามารถแยกวิเคราะห์นิพจน์ (Executable texvcไม่พบ; ดูคณิตศาสตร์ / README สำหรับความช่วยเหลือในการตั้งค่า): V_2 ^ 2 = \ left ((\ frac (d) (dt)) (\ left (x- \ ell \ sin \ theta \ right)) \ right) ^ 2 + \ ซ้าย ((\ frac (d) (dt)) (\ left (\ ell \ cos \ theta \ right)) \ right) ^ 2
ลดความซับซ้อนของนิพจน์ ไม่สามารถแยกวิเคราะห์นิพจน์ (Executable texvcไม่พบ; ดูคณิตศาสตร์ / README - การอ้างอิงการตั้งค่า): V_2นำไปสู่:
texvcไม่พบ; ดูคณิตศาสตร์ / README สำหรับความช่วยเหลือในการตั้งค่า): V_2 ^ 2 = \ dot x ^ 2 -2 \ ell \ dot x \ dot \ theta \ cos \ theta + \ ell ^ 2 \ dot \ theta ^ 2
Lagrangian ถูกกำหนดโดยสูตร:
ไม่สามารถแยกวิเคราะห์นิพจน์ (Executabletexvcไม่พบ; ดูคณิตศาสตร์ / README สำหรับความช่วยเหลือในการตั้งค่า): L = \ frac (1) (2) \ left (M + m \ right) \ dot x ^ 2 -m \ ell \ dot x \ dot \ theta \ cos \ theta + \ frac (1) (2) m \ ell ^ 2 \ dot \ theta ^ 2-mg \ ell \ cos \ theta
และสมการการเคลื่อนที่:
ไม่สามารถแยกวิเคราะห์นิพจน์ (Executabletexvcไม่พบ; ดูคณิตศาสตร์ / README สำหรับความช่วยเหลือในการปรับแต่ง): \ Frac (\ mathrm (d)) (\ mathrm (d) t) (\บางส่วน (L) \ เกิน \ บางส่วน (\ dot x)) - (\ บางส่วน ( L) \ เกิน \ บางส่วน x) = F
ไม่สามารถแยกวิเคราะห์นิพจน์ (Executable texvcไม่พบ; ดูคณิตศาสตร์ / README สำหรับความช่วยเหลือในการปรับแต่ง): \ Frac (\ mathrm (d)) (\ mathrm (d) t) (\บางส่วน (L) \ เกิน \ บางส่วน (\ dot \ theta)) - (\ บางส่วน (L ) \ เกิน \ บางส่วน \ theta) = 0
การแทน ไม่สามารถแยกวิเคราะห์นิพจน์ (Executable texvcไม่พบ; ดูคณิตศาสตร์ / README - ความช่วยเหลือในการตั้งค่า): Lในนิพจน์เหล่านี้ด้วยการทำให้เข้าใจง่ายที่ตามมาจะนำไปสู่สมการที่อธิบายการเคลื่อนที่ของลูกตุ้มส่วนกลับ:
texvcไม่พบ; ดูคณิตศาสตร์ / README สำหรับความช่วยเหลือในการตั้งค่า): \ ซ้าย (M + m \ ขวา) \ ddot x - m \ ell \ ddot \ theta \ cos \ theta + m \ ell \ dot \ theta ^ 2 \ sin \ theta = F
ไม่สามารถแยกวิเคราะห์นิพจน์ (Executable texvcไม่พบ; ดูคณิตศาสตร์ / README สำหรับความช่วยเหลือในการตั้งค่า): \ Ell \ ddot \ theta - g \ sin \ theta = \ ddot x \ cos \ theta
สมการเหล่านี้ไม่เป็นเชิงเส้น แต่เนื่องจากเป้าหมายของระบบควบคุมคือการถือลูกตุ้มในแนวตั้ง สมการจึงสามารถทำให้เป็นเส้นตรงได้โดยใช้ ไม่สามารถแยกวิเคราะห์นิพจน์ (Executable texvcไม่พบ; ดูคณิตศาสตร์ / README สำหรับความช่วยเหลือในการตั้งค่า): \ Theta \ ประมาณ 0
.
สมการการเคลื่อนที่ของลูกตุ้มดังกล่าวสัมพันธ์กับฐานการสั่นแบบไม่มีมวล และได้รับในลักษณะเดียวกับลูกตุ้มบนรถเข็น ตำแหน่งของจุดวัสดุถูกกำหนดโดยสูตร:
ไม่สามารถแยกวิเคราะห์นิพจน์ (Executabletexvcไม่พบ; ดูคณิตศาสตร์ / README สำหรับความช่วยเหลือในการตั้งค่า): \ ซ้าย (- \ ell \ sin \ theta, y + \ ell \ cos \ theta \ right)
และพบความเร็วผ่านตำแหน่งอนุพันธ์อันดับแรก:
ไม่สามารถแยกวิเคราะห์นิพจน์ (Executabletexvcไม่พบ; ดูคณิตศาสตร์ / README สำหรับความช่วยเหลือในการตั้งค่า): V ^ 2 = \ dot y ^ 2-2 \ ell \ dot y \ dot \ theta \ sin \ theta + \ ell ^ 2 \ dot \ theta ^ 2
ไม่สามารถแยกวิเคราะห์นิพจน์ (Executable texvcไม่พบ; ดูคณิตศาสตร์ / README สำหรับความช่วยเหลือในการตั้งค่า): \ Ddot \ theta - (g \ over \ ell) \ sin \ theta = - (A \ over \ ell) \ omega ^ 2 \ sin \ omega t \ sin \ theta .. .
สมการนี้ไม่มีคำตอบเบื้องต้นในรูปแบบปิด แต่สามารถศึกษาได้ในหลายทิศทาง ใกล้เคียงกับสมการมาติเยอ เช่น เมื่อแอมพลิจูดการสั่นมีขนาดเล็ก การวิเคราะห์แสดงให้เห็นว่าลูกตุ้มยังคงตั้งตรงระหว่างการแกว่งอย่างรวดเร็ว กราฟแรกแสดงว่ามีความผันผวนช้า ไม่สามารถแยกวิเคราะห์นิพจน์ (Executable texvc , ลูกตุ้มตกอย่างรวดเร็วหลังจากออกมาจากตำแหน่งแนวตั้งที่มั่นคง
ถ้า ไม่สามารถแยกวิเคราะห์นิพจน์ (Executable texvcไม่พบ; ดูคณิตศาสตร์ / README สำหรับความช่วยเหลือในการกำหนดค่า): Yผันผวนอย่างรวดเร็ว ลูกตุ้มสามารถคงที่เกี่ยวกับตำแหน่งแนวตั้ง กราฟที่สองแสดงให้เห็นว่า หลังจากออกจากตำแหน่งแนวตั้งที่มั่นคง ลูกตุ้มเริ่มแกว่งไปรอบๆ ตำแหน่งแนวตั้ง ( ไม่สามารถแยกวิเคราะห์นิพจน์ (Executable texvcไม่พบ; ดูคณิตศาสตร์ / README สำหรับความช่วยเหลือในการกำหนดค่า): \ Theta = 0ความเบี่ยงเบนจากตำแหน่งแนวตั้งยังคงน้อย และลูกตุ้มไม่ตก
ตัวอย่างคือการสร้างสมดุลระหว่างผู้คนและสิ่งของ เช่น กายกรรมหรือปั่นจักรยาน และยังมี Segway สกู๊ตเตอร์ไฟฟ้าทรงตัวสองล้อ
ลูกตุ้มคว่ำเป็นองค์ประกอบหลักในการพัฒนาเครื่องวัดแผ่นดินไหวรุ่นก่อนๆ หลายเครื่อง
Alexandra (Alexis) Obolenskaya Vasily และ Anna Seregin
อาจเป็นไปได้ว่าคุณต้องแตกต่างอย่างแท้จริงเพื่อที่จะพบจุดแข็งในการตัดสินใจเลือกและทำตามเจตจำนงเสรีของคุณเองในที่ที่คุณกำลังจะไป ขณะที่คุณไปสู่ความตายของคุณเองเท่านั้น และน่าเสียดายที่ "ความตาย" นี้ถูกเรียกว่าไซบีเรีย ...
ฉันรู้สึกเศร้าและเจ็บปวดมาโดยตลอด ภูมิใจมาก แต่รองเท้าบู๊ทของบอลเชวิคถูกเหยียบย่ำอย่างไร้ความปราณี ความงดงามของไซบีเรีย! .. เช่นเดียวกับสิ่งอื่น ๆ กองกำลัง "สีดำ" ทำให้มันกลายเป็น "ความร้อนทางโลก" ที่น่าสะพรึงกลัว โดยผู้คน ... และไม่มีคำพูดใดสามารถบอกได้ว่าความทุกข์ ความเจ็บปวด ชีวิต และน้ำตา หยิ่งผยองนี้ แต่ดินแดนที่เหน็ดเหนื่อยได้ซึมซับเข้าไปในตัวมันเอง ... เป็นเพราะว่าครั้งหนึ่งเคยเป็นหัวใจของบ้านบรรพบุรุษของเราที่ "สายตายาว" นักปฏิวัติ" ตัดสินใจที่จะดำคล้ำและทำลายดินแดนนี้โดยเลือกเพื่อจุดประสงค์ที่ชั่วร้ายของพวกเขา ... ท้ายที่สุดสำหรับหลาย ๆ คนแม้หลังจากผ่านไปหลายปีไซบีเรียยังคงเป็นดินแดนที่ "สาปแช่ง" ที่ซึ่งพ่อของใครบางคนพี่ชายของใครบางคนแล้ว ลูกชาย ... หรือแม้แต่ครอบครัวของใครบางคนทั้งหมด
คุณยายของฉัน ซึ่งฉันเคยรู้สึกผิดหวังอย่างแรงกล้า ตอนนั้นท้องกับพ่อของฉันและต้องอดทนกับเส้นทางที่ยากลำบากมาก แต่แน่นอนว่าไม่จำเป็นต้องรอความช่วยเหลือจากทุกที่ ... ดังนั้นเจ้าหญิงสาว Elena แทนที่จะเป็นเสียงกรอบแกรบของหนังสือในห้องสมุดของครอบครัวหรือเสียงเปียโนปกติเมื่อเธอเล่นงานโปรดของเธอ คราวนี้เธอฟังเพียงเสียงล้ออันน่าสยดสยองซึ่งดูเหมือนจะคุกคามพวกเขากำลังนับถอยหลังชั่วโมงที่เหลือของเธอซึ่งเปราะบางและกลายเป็นฝันร้ายของชีวิตที่แท้จริง ... เธอนั่งบนกระสอบที่หน้าต่างรถสกปรก และจ้องไปที่ร่องรอยที่น่าสังเวชครั้งสุดท้ายของ "อารยธรรม" ที่คุ้นเคยและคุ้นเคยของเธอต่อไป ...
อเล็กซานดรา น้องสาวของปู่ด้วยความช่วยเหลือจากเพื่อนๆ พยายามหลบหนีจากจุดแวะพักแห่งหนึ่ง ตามข้อตกลงทั่วไป เธอต้องเดินทางไปฝรั่งเศส (ถ้าเธอโชคดี) ซึ่งปัจจุบันทั้งครอบครัวของเธออาศัยอยู่ จริงอยู่ ไม่มีใครในตอนนั้นที่มีความคิดใดๆ ว่าเธอจะทำสิ่งนี้ได้อย่างไร แต่เนื่องจากนี่เป็นเพียงความหวังเดียวของพวกเขา แม้ว่าจะเล็กน้อย แต่แน่นอนว่าเป็นความหวังสุดท้าย มันจึงเป็นความฟุ่มเฟือยมากเกินไปที่จะละทิ้งมันสำหรับสถานการณ์ที่สิ้นหวังอย่างสมบูรณ์ของพวกเขา มิทรีสามีของอเล็กซานดราก็อยู่ที่ฝรั่งเศสในขณะนั้นด้วยความช่วยเหลือจากที่นั่นเพื่อพยายามช่วยครอบครัวของปู่ของพวกเขาให้พ้นจากฝันร้ายที่พวกเขาถูกโยนทิ้งอย่างไร้ความปราณีด้วยชีวิต มือของคนถูกทารุณ ...
เมื่อมาถึง Kurgan พวกเขาถูกวางไว้ในห้องใต้ดินที่เย็นชาโดยไม่อธิบายหรือตอบคำถามใด ๆ สองวันต่อมา บางคนมาหาคุณปู่ และบอกว่าพวกเขามาเพื่อ "พา" เขาไปยัง "จุดหมาย" อื่น ... ที่ไหนและนานแค่ไหนที่พวกเขาจะพาเขาไป ไม่มีใครเคยเห็นปู่อีกเลย หลังจากนั้นไม่นาน ทหารนิรนามก็นำของใช้ส่วนตัวของคุณยายมาใส่ในกระสอบถ่านสกปรก ... โดยไม่อธิบายอะไรและไม่ทิ้งความหวังที่จะได้เห็นเขามีชีวิตอยู่ ในเรื่องนี้ข้อมูลเกี่ยวกับชะตากรรมของปู่หยุดลงราวกับว่าเขาหายตัวไปจากพื้นโลกโดยไม่มีร่องรอยและหลักฐาน ...
หัวใจที่ทรมานและทรมานของเจ้าหญิงเอเลน่าผู้น่าสงสารไม่ต้องการรับมือกับความสูญเสียที่เลวร้ายเช่นนี้ และเธอได้โจมตีเจ้าหน้าที่ท้องถิ่นด้วยการร้องขอให้ชี้แจงสถานการณ์การเสียชีวิตของนิโคไลอันเป็นที่รักของเธอ แต่เจ้าหน้าที่ "สีแดง" ตาบอดและหูหนวกต่อคำขอของผู้หญิงที่อ้างว้าง อย่างที่พวกเขาเรียกเธอว่า "ขุนนาง" ผู้ซึ่งสำหรับพวกเขานั้นเป็นเพียงหนึ่งในหน่วย "จำนวน" นิรนามนับไม่ถ้วนซึ่งไม่มีความหมายอะไรในหน่วยของพวกเขา โลกที่เย็นชาและโหดร้าย ... มันเป็นนรกที่แท้จริงซึ่งไม่มีทางกลับสู่โลกที่คุ้นเคยและใจดีซึ่งบ้านของเธอเพื่อนของเธอยังคงอยู่และทุกสิ่งที่เธอคุ้นเคยตั้งแต่อายุยังน้อยและ ที่เธอรักมากและจริงใจ .. และไม่มีใครสามารถช่วยหรือให้ความหวังเพียงเล็กน้อยที่จะอยู่รอด
Seryogins พยายามรักษาการมีอยู่ของจิตใจไว้สามคนและพยายามทุกวิถีทางที่จะทำให้อารมณ์ของเจ้าหญิงเอเลน่าดีขึ้น แต่เธอก็ลึกและลึกลงไปในอาการชาที่เกือบจะสมบูรณ์และบางครั้งนั่งทั้งวันในสภาพที่ไม่แยแสและเยือกแข็งเกือบ ไม่ตอบสนองต่อความพยายามของเพื่อน ๆ ที่จะรักษาหัวใจและจิตใจของเธอจากภาวะซึมเศร้าขั้นสุดท้าย มีเพียงสองสิ่งที่ทำให้เธอกลับสู่โลกแห่งความเป็นจริงชั่วครู่ - ถ้ามีคนเริ่มพูดถึงลูกที่ยังไม่เกิดของเธอหรือถ้ามี รายละเอียดใหม่เกี่ยวกับการเสียชีวิตที่ถูกกล่าวหาของนิโคไลอันเป็นที่รักของเธอ (ถ้ามี) ก็มาถึง เธออยากรู้อย่างยิ่ง (ในขณะที่เธอยังมีชีวิตอยู่) ว่าเกิดอะไรขึ้นจริง ๆ และสามีของเธออยู่ที่ไหน หรืออย่างน้อยก็ที่ศพของเขาถูกฝัง (หรือถูกทอดทิ้ง)
น่าเสียดายที่แทบไม่มีข้อมูลเกี่ยวกับชีวิตของสองคนนี้ที่กล้าหาญและสดใส Elena และ Nicholas de Rogan-Hesse-Obolensky แต่แม้กระทั่งบรรทัดสองสามบรรทัดจากจดหมายสองฉบับที่เหลือของ Elena ถึง Alexandra ลูกสะใภ้ของเธอ ซึ่งรอดชีวิตมาได้ใน จดหมายเหตุครอบครัวของอเล็กซานดราในฝรั่งเศส แสดงให้เห็นว่าเจ้าหญิงรักสามีที่หายตัวไปอย่างลึกซึ้งและอ่อนโยนเพียงใด มีแผ่นงานเขียนด้วยลายมือเพียงไม่กี่แผ่นเท่านั้นที่รอดชีวิต บางบรรทัดไม่สามารถทำออกมาได้เลย แต่ถึงกระนั้นสิ่งที่เราทำสำเร็จก็กรีดร้องด้วยความเจ็บปวดอย่างสุดซึ้งเกี่ยวกับความโชคร้ายที่ยิ่งใหญ่ของมนุษย์ซึ่งโดยไม่ต้องประสบกับมันไม่ใช่เรื่องง่ายที่จะเข้าใจและเป็นไปไม่ได้ที่จะยอมรับ
12 เมษายน 2470 จากจดหมายจาก Princess Helena ถึง Alexandra (Alix) Obolenskaya:
“วันนี้ฉันเหนื่อยมาก เธอกลับจากสินยาชิกะหักไปหมดแล้ว ในตู้นั้นเต็มไปด้วยผู้คน ถึงแม้จะขนวัวไปด้วยก็น่าเสียดาย ... ... ... ... ... ... ... ... ... ... .. เราหยุดอยู่ในป่า - มีกลิ่นเห็ดและสตรอเบอร์รี่แสนอร่อย ... ไม่น่าเชื่อว่ามีคนโชคร้ายเหล่านี้ถูกฆ่าตายอยู่ที่นั่น! Ellochka ที่น่าสงสาร (ฉันหมายถึง Grand Duchess Elizabeth Feodorovna ซึ่งเป็นญาติของปู่ของฉันในสาย Hesse) ถูกฆ่าตายที่นี่ใกล้ ๆ ในเหมือง Staroselimsk ที่น่ากลัวนี้ ... ช่างน่ากลัวจริงๆ! จิตวิญญาณของฉันไม่สามารถยอมรับสิ่งนี้ได้ คุณจำได้ไหมเมื่อเราพูดว่า: "ให้แผ่นดินโลกสงบสุข" หรือไม่ .. พระเจ้าผู้ยิ่งใหญ่ดินแดนดังกล่าวจะสงบสุขได้อย่างไร ..
โอ้ Alix ที่รักของฉัน Alix! คนเราจะจัดการกับความสยองขวัญดังกล่าวได้อย่างไร? ...................... ................................ ถามเหนื่อยจัง และทำให้ตัวเองอับอาย ... ทุกอย่างจะไร้ประโยชน์อย่างสมบูรณ์หาก Cheka ไม่ตกลงที่จะส่งคำขอไปยัง Alapaevsk .................. ฉันจะไม่รู้ว่าจะไปหาเขาที่ไหน และฉันจะไม่มีวันรู้ว่าพวกเขาทำอะไรกับเขา ผ่านไปไม่ถึงชั่วโมงที่ฉันไม่นึกถึงใบหน้าที่คุ้นเคยสำหรับฉัน ... ช่างน่าสยดสยองที่จินตนาการว่าเขากำลังนอนอยู่ในหลุมร้างหรือที่ก้นเหมือง! .. คุณจะอดทนกับสิ่งนี้ได้อย่างไร ฝันร้ายทุกวัน ทั้งที่รู้ว่าจะไม่มีวันเจอเขา ?! .. เหมือนกับคอร์นฟลาวเวอร์ผู้น่าสงสารของฉัน (ชื่อที่พ่อตั้งให้เมื่อแรกเกิด) จะไม่มีวันได้เห็น ... ขีด จำกัด ของความโหดร้ายอยู่ที่ไหน? และทำไมพวกเขาถึงเรียกตัวเองว่าคน ..
มีวิธีการอื่นที่ไม่ธรรมดาในการอธิบายเทคนิคการเล่นสกี อีกทั้งไม่เกี่ยวข้องกับการเคลื่อนไหวในระบบบานพับที่สอดคล้องกับส่วนต่างๆ ของร่างกายของนักเล่นสกี อิงจากแบบจำลองลูกตุ้มคว่ำ หรือที่เรียกว่า "ลูกตุ้มคว่ำ" หรือ "ลูกตุ้มวิทนีย์"
นี่เป็นวัตถุที่น่าสนใจมากของกลศาสตร์เชิงทฤษฎี ในขั้นต้นปัญหาของวิทนีย์ถูกกำหนดขึ้นดังนี้: สมมติว่ามีการติดตั้งลูกตุ้มวัสดุคว่ำบนรถเข็น รถเข็นเคลื่อนที่เป็นเส้นตรง แต่ไม่สม่ำเสมอ จำเป็นต้องหาตำแหน่งเริ่มต้นของลูกตุ้ม เพื่อไม่ให้ตกบนเกวียน หากทราบล่วงหน้าว่าต้องอาศัยความเร็วตรงเวลา ด้วยความต่อเนื่องของอนุพันธ์อันดับที่ 2
ปัญหาของวิทนีย์ยังคงเป็นที่สนใจของนักคณิตศาสตร์ แต่ปัญหาผกผันมีความสำคัญมากกว่า นั่นคือ การควบคุมการเคลื่อนที่ของเกวียนแบบไดนามิก เพื่อให้ลูกตุ้มคงตำแหน่งเริ่มต้นที่กำหนด หรือแกว่งไปรอบๆ งานนี้มีความสำคัญสำหรับวิทยาการหุ่นยนต์ การนำทาง ระบบการผลิตอัตโนมัติ การวางแนวยานอวกาศ และยังรับรู้ได้ในระหว่างการเดินปกติ
แต่ปัญหาสามารถสรุปได้ทั่วไป: สำหรับลูกตุ้มที่มี 2 องศาอิสระซึ่งการสนับสนุนได้เคลื่อนที่ไปตามวิถีโคจรโค้งตามอำเภอใจด้วยความเร็วตัวแปร แต่ยังอยู่ภายใต้เงื่อนไขของอนุพันธ์ 2 ตัวที่ต่อเนื่องกัน ตัวอย่างที่ง่ายที่สุดของลูกตุ้มผกผันทั่วไป: วางไม้เท้ายาวไว้บนฝ่ามือแล้วถือไว้ในตำแหน่งที่ไม่มั่นคง เคลื่อนมือไปตามวิถีตามอำเภอใจ
หากเราสรุปเพิ่มเติม เราสามารถสร้างลูกตุ้มที่มีความยาวผันแปรได้ แม้ว่าความถี่ตามธรรมชาติจะเปลี่ยนไป งานจะซับซ้อนมากขึ้น นี่เป็นแบบจำลองทั่วไปของความสมดุลของระบบกลไกที่ไม่เสถียรอยู่แล้ว ตัวอย่างเช่น คนบนเชือก แต่งานนี้ยังสามารถวางในลักษณะที่แตกต่างกัน: เพื่อให้แน่ใจว่าความสมดุลของลูกตุ้มด้วยการเคลื่อนไหวที่ไม่สม่ำเสมอของการรองรับตามวิถีโคจรที่กำหนดเนื่องจากการเปลี่ยนแปลงอย่างต่อเนื่องในความเอียงและความยาวของลูกตุ้ม เราเห็นแล้ว: ในการตั้งค่านี้ งานนี้สอดคล้องกับการเคลื่อนไหวของนักเล่นสกีบนลู่!
ปรากฎว่าในปี 1973 นักคณิตศาสตร์ชาวโปแลนด์ Janusz Moravsky อธิบายกลไกของนักเล่นสกีโดยใช้ลูกตุ้มย้อนกลับ แต่งานนี้ถูกลืมไปเป็นเวลา 40 ปีแล้ว
โมเดลของ Moravsky ไม่สมบูรณ์แบบ: เขาไม่ได้คำนึงถึงการเลื่อนด้านข้างของการรองรับลูกตุ้มซึ่งจำเป็นในอุปกรณ์สกีในช่วงต้นทศวรรษ 1970 แต่สำหรับนักกีฬาระดับสูงสมัยใหม่ เทคนิคไม่เกี่ยวข้องกับการเลื่อนหลุดอีกต่อไป และแบบจำลองนั้นตรงกับความเป็นจริงมากขึ้น
การวิจัยใหม่เกี่ยวกับลูกตุ้มย้อนกลับเริ่มต้นด้วยการแก้ปัญหาที่แคบและใช้งานได้จริง: เพื่อลดความซับซ้อนของการทดลองในการศึกษาเทคโนโลยีสกี โดยปกติในการศึกษาการเคลื่อนไหวของนักเล่นสกีจำเป็นต้องบันทึกตำแหน่งของมันอย่างต่อเนื่องและกองกำลังจำนวนมากที่กระทำบนสกีและนักเล่นสกีเองต้องการอุปกรณ์ที่ซับซ้อนและการเตรียมการทดลองเป็นเวลานาน
ในปี 2013 Mathias Gilgien ช่างเครื่องสกีชื่อดังได้พิสูจน์ว่าหากทราบเส้นทางของจุดศูนย์กลางมวลสัมพันธ์กับพื้นผิวหิมะแล้ว การใช้แบบจำลองลูกตุ้มทั่วไปก็สามารถคำนวณวิถีของสกีได้เช่นกัน เป็นแรงกระทำทั้งหมดในระหว่างการสืบเชื้อสาย ด้วยเหตุนี้ อุปกรณ์วัดที่ซับซ้อนทั้งหมดจึงถูกแทนที่ด้วยเครื่องนำทาง GPS แบบเดิม!
การทดลองดำเนินการด้วยเครื่องนำทาง geodetic ซึ่งทำงานตามวิธีการนำทางแบบดิฟเฟอเรนเชียล โดยมีความแม่นยำในการกำหนดพิกัด: 1 ซม. ในระนาบแนวนอน และ 2 ซม. ในระนาบแนวตั้ง นอกจากนี้ยังใช้แบบจำลองภูมิประเทศ 3 มิติแบบละเอียดที่ได้รับจากเครื่องสแกน geodetic สำหรับบางภูมิภาคของสหรัฐอเมริกาและยุโรป ในการเข้าถึงแบบเปิด มีแผนที่ดาวเทียม 3 มิติที่มีความแม่นยำใกล้เคียงกัน พื้นที่ครอบคลุมเพิ่มขึ้นอย่างรวดเร็ว
โดยคำนึงถึงไมโครรีลีฟที่เปลี่ยนแปลงอย่างต่อเนื่องบนทางลาด ความแม่นยำของความสูงคือ 10-20 ซม. กล่าวคือ ลำดับความสำคัญต่ำกว่าความแม่นยำในการนำทาง เสาอากาศนำทางตั้งอยู่บนหมวกของนักเล่นสกีตำแหน่งของ CM คำนวณจากผลลัพธ์ก่อนหน้าของ Robert Reid ผู้ค้นพบ: ในบรรดานักกีฬาระดับทีมชาติ CM ไม่เบี่ยงเบนจากเส้นตรงที่ผ่าน ตรงกลางคอและระยะห่างระหว่างสกี และเมื่อนักเล่นสกีหมุนตัวพยายามตั้งศีรษะให้ตรงตรงกลางคอจะอยู่ใต้เสาอากาศโดยประมาณ ระยะทาง "surface-CM" จะอยู่ที่ประมาณ 0.45-0.5 ของระยะทาง "surface-head" เสมอ บางครั้ง CM อาจเบี่ยงเบนไปจากตำแหน่งนี้ แต่คำนึงถึงความถูกต้องของการแสดงพื้นผิว ข้อผิดพลาดในการคำนวณตำแหน่งของ CM ไม่มีนัยสำคัญ การเบี่ยงเบนที่รุนแรงเกิดขึ้นเฉพาะกับข้อผิดพลาดคร่าวๆ กับการสูญเสียการทรงตัว
หากนักสกีถูกอธิบายโดยแบบจำลองของลูกตุ้มส่วนกลับทั่วไปที่มีความยาวผันแปรได้ ตามวิถีโคจรที่ทราบและความเร็วของ CM ที่สัมพันธ์กับพื้นผิว การคำนวณมุมของการเบี่ยงเบนจากแนวตั้งนั้นเป็นไปได้ ตำแหน่งเพื่อให้ลูกตุ้มไม่ตก คุณยังสามารถรับวิถีของแนวรับ: จุดที่อยู่ตรงกลางระยะห่างระหว่างสกีที่ผูกไว้ และจากตำแหน่งของ CM ที่สัมพันธ์กับส่วนรองรับคุณสามารถทำให้นักเล่นสกีอยู่ตรงกลางในทิศทางตามยาวและเอียงไปที่ศูนย์กลางของเทิร์นแม้ว่าจะเป็นไปไม่ได้ที่จะคำนวณตำแหน่งของส่วนต่าง ๆ ของร่างกายและภาระสัมพัทธ์ ของสกี
ควบคู่ไปกับการวัด GPS ที่ไซต์ควบคุม มีการติดตั้งอุปกรณ์ปกติซึ่งใช้ในการศึกษาอุปกรณ์สกีโดยใช้วิธี MOCAP ตามแบบจำลองของระบบข้อต่อด้วยการคำนวณไดนามิกของส่วนต่างๆ ของร่างกายโดยใช้ความยาว - วิธีการที่พิสูจน์แล้ว ข้อมูลที่รวบรวมเกี่ยวกับการเคลื่อนที่ของ CM ถูกเปรียบเทียบ: พวกมันอยู่ใกล้มาก มีความคลาดเคลื่อนอย่างมากเฉพาะในส่วนต่างๆ ระหว่างเทิร์น ซึ่งความยาวของลูกตุ้มเปลี่ยนแปลงอย่างรวดเร็วระหว่างการขนถ่าย
แต่งานนี้ไม่ได้จำกัดอยู่แค่การสร้างโมเดลใหม่ของการเคลื่อนไหว CM โดยไม่ขึ้นกับตำแหน่งของนักเล่นสกี ไม่มีใครต้องการมัน! เป้าหมายในทางปฏิบัติ: บนพื้นฐานของแบบจำลองลูกตุ้มย้อนกลับ เพื่อให้ได้แรงภายนอกที่กระทำต่อนักเล่นสกีและสกี: ปฏิกิริยาพื้นผิว แรงต้านหิมะ และการลากตามหลักอากาศพลศาสตร์ Dr. M. Gilgien และเพื่อนร่วมงานของเขาได้รับสมการของแรงทั้งหมด และเปรียบเทียบกับค่าที่คำนวณจากไดนามิกของส่วนต่างๆ ของร่างกาย ในกราฟปฏิกิริยาพื้นผิวตัวอย่าง: เส้นโค้งสีน้ำเงินแสดงแรงที่คำนวณจากแบบจำลองลูกตุ้ม สีแดงจากแบบจำลองระบบเดือยหมุนเป็นข้อมูลอ้างอิง
Rolf Adelsberger นักวิทยาศาสตร์ชาวสวิสได้ทำการทดลองที่คล้ายกัน แต่ยังวัดการเสียรูปของสกีในระหว่างการตกลงโดยใช้เซ็นเซอร์ที่ติดอยู่บนสกี ผลการวัดสอดคล้องกับแรงซึ่งคำนวณจากข้อมูล GPS ด้วยตามวิธีการของ M. Gilgien ซึ่งเป็นการพิสูจน์ความถูกต้องของวิธีการ
นักคณิตศาสตร์ชาวสโลวีเนีย Bojan Nemec ยังได้ศึกษาแบบจำลองลูกตุ้มย้อนกลับกับนักกีฬาของทีมชาติสโลวีเนีย แต่ได้ติดตั้งเสาอากาศไว้ที่คอของนักเล่นสกีเพื่อให้ใกล้เคียงกับตำแหน่ง CM มากขึ้น เขาได้สมการของมุมเชิงพื้นที่ของการเอียง: ขึ้นอยู่กับความเร่งกระทำและความยาวของลูกตุ้ม
เราเห็นแล้วว่าสมการนี้ซับซ้อนกว่าสูตรมุมง่ายๆ ที่พูดถึงกันบ่อยๆ ในลานสกี! แต่สมการนี้ได้มาจากข้อมูลการทดลอง และสอดคล้องกับกระบวนการจริงที่เกิดขึ้นระหว่างการสืบเชื้อสายอย่างแม่นยำมากขึ้น การแก้ไขยังได้รับการแก้ไขเพื่อระบุตำแหน่งของ CM อย่างแม่นยำ แต่กลับกลายเป็นว่า ขนาดไม่ใหญ่มากและเข้ากับความแม่นยำของการวัดพื้นผิว ตามที่ M. Gilgien เคยแนะนำไว้ก่อนหน้านี้
ศาสตราจารย์บี. เนเมตส์ยังสังเกตเห็นความคลาดเคลื่อนอย่างมากในส่วนการขนถ่าย และแนะนำว่าข้อผิดพลาดนั้นเกี่ยวข้องกับกฎเชิงเส้นของการแปรผันในความยาวของลูกตุ้ม หากเราแนะนำความยืดหยุ่นตามยาว ความยาวจะเปลี่ยนเป็นแบบไม่เชิงเส้น และข้อผิดพลาดจะลดลงอย่างรวดเร็ว แต่ในขณะเดียวกัน ลูกตุ้มจะได้รับระดับความอิสระใหม่: ความยาวมีแนวโน้มที่จะสั่นแบบฮาร์โมนิก ซึ่งต้องมีการแก้ไขแบบจำลองทั้งหมด B. ชาวเยอรมันวางแผนที่จะทำสิ่งนี้ในงานต่อไป ปัญหาหลัก: การแนะนำของสัมประสิทธิ์ความยืดหยุ่นซึ่งขึ้นอยู่กับความถี่ธรรมชาติของการสั่นสะเทือนตามยาวเพราะเป็นไปได้ว่าค่าสัมประสิทธิ์จะไม่คงที่
ในกรณีนี้ เป็นไปได้ที่จะได้เอฟเฟกต์ใหม่: หากการรองรับของลูกตุ้มสั่นสะเทือนในแนวตั้งด้วยความถี่สูงและแอมพลิจูดน้อย แรงเพิ่มเติมก็เกิดขึ้นที่ทำให้ลูกตุ้มอยู่ในสมดุลแนวตั้ง: ปรากฏการณ์นี้ถูกค้นพบ โดย P. Kapitsa และเขาได้กำหนดความถี่ต่ำสุดของการแกว่งและแอมพลิจูดสูงสุดของพวกมัน ในการตอบสนองต่อการกระแทกเพียงครั้งเดียวบนพื้นผิวที่ยืดหยุ่นได้ การสั่นของแดมเปอร์จึงเกิดขึ้น ดังนั้นลูกตุ้มย้อนกลับซึ่งติดตั้งอยู่บนส่วนรองรับแบบยืดหยุ่นก็จะอยู่ในสมดุลเช่นกัน แต่จะมีระยะเวลาสั้นมากหลังจากการกระทบ: จนกระทั่งการสั่นชื้น ปรากฏการณ์ที่คล้ายกันนี้เป็นไปได้ด้วยการเปลี่ยนแปลงอย่างรวดเร็วของภาระบนสกี แต่ความยืดหยุ่นตามยาวขึ้นอยู่กับปริมาณการดัดงานจะซับซ้อนยิ่งขึ้น
แต่การคำนวณกำลังก็ไม่ใช่เป้าหมายสูงสุดเช่นกัน: ดร. เอ็ม. กิลเกียนได้รับภาระหนักที่หัวเข่าของนักเล่นสกี ซึ่งอาจนำไปสู่การบาดเจ็บที่ข้อต่อได้ วิธีการของเขาทำให้สามารถรับการประเมินเส้นทางจากมุมมองด้านความปลอดภัย โดยใช้ข้อมูล GPS ระหว่างการทดลองขับเท่านั้น
อีกแนวทางหนึ่งคือ การสร้างเครื่องมือสำหรับผู้ฝึกสอนที่แสดงพลวัตของนักเล่นสกีอย่างต่อเนื่อง ซึ่งซ่อนจากการสังเกตโดยตรง: สภาพสมดุล การเร่งความเร็ว และแรงกระทำ วิธีนี้ไม่ต้องใช้อุปกรณ์ที่ซับซ้อนและมีราคาแพง เพราะแม้แต่เครื่องรับ GPS ที่มีราคาแพงมากก็ยังถูกกว่าระบบ MOCAP หรือเซ็นเซอร์เฉื่อยหลายเท่า และใช้งานง่ายกว่ามาก
เราเห็นแล้วว่า: แนวคิดเก่าในการอธิบายเทคนิคการเล่นสกีโดยไม่เกี่ยวข้องกับการเคลื่อนไหวของนักเล่นสกีนั้นยังไม่ถูกลืม แม้ว่าจะมีเทคโนโลยีใหม่เกิดขึ้น เป็นไปได้ที่เราจะบอกลาม้าทรงกลมที่น่ารักก่อนเวลาอันควร
ขอให้โชคดีและสมดุล!
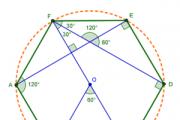
ด้วยคำถาม: "จะหาพื้นที่ของรูปหกเหลี่ยมได้อย่างไร" , คุณสามารถพบไม่เพียง แต่ในการสอบในเรขาคณิต ฯลฯ ความรู้นี้ ...

และวงโคจรของเขาไม่ใช่วงกลม แต่เป็นวงรี และตัวเขาเองก็เล็กมาก ดังนั้นเขาจึงไม่สามารถอยู่ในรายการเดียวกันกับเช่น ...

บทความนี้จะพูดถึงวิธีการเตรียมจานองุ่นแสนอร่อยและจะมีการอธิบายสูตรสำหรับ Churchkhela ที่แท้จริง ...

เทือกเขาคอเคซัส ระบบภูเขาทอดยาวจากคาบสมุทรทามันไปจนถึงคาบสมุทรอับเชอรอน ระหว่างทะเลดำและทะเลแคสเปียน ...

ฟัวกราส์ - ฟัวกราส์และสัญลักษณ์แห่งความเก๋ไก๋ในการกิน - ถือเป็นสิ่งประดิษฐ์ของชาวฝรั่งเศส ...

(เห็ดเมาส์) หรือ ryadovka ริ้ว - เห็ดกินได้ ✎ ความเกี่ยวข้องและคุณสมบัติทั่วไป Ryadovka (lat ....


ระบบข้าแผ่นดินปกครองในรัสเซียเป็นเวลาหลายศตวรรษ ประวัติความเป็นทาสของชาวนาใช้ ...

ผู้ใช้คอมพิวเตอร์ส่วนบุคคลและแล็ปท็อปหลายคนมักมีรหัสผ่านในคอมพิวเตอร์ของตน เขา...

ไม่เป็นความลับที่ตั้งแต่ปี 2015 ความนิยมของเทคโนโลยีการสื่อสารเช่น 3G เติบโตขึ้นพร้อมกับทุก ...

เราจำเป็นต้องเชื่อมต่ออินเทอร์เน็ต ... ผู้โทรทุก ๆ 10 ประมาณ (ก่อนหน้านี้บ่อยกว่า) ถามว่าเรากำลังเชื่อมต่อ ...
เทคโนโลยีอินเทอร์เน็ตเบื้องต้น ประวัติความเป็นมาของการสร้างและพัฒนาแหล่งข้อมูลและเทคโนโลยีอินเทอร์เน็ต ...
แผนผังแสดงลูกตุ้มคว่ำบนรถเข็น แท่งไม่มีมวล น้ำหนักและน้ำหนักรถเข็น ...

ในการตรวจสอบนี้ เราจะพูดถึงความครอบคลุมของ LTE ล่าสุด LTE สำหรับสมาร์ทโฟนคืออะไรมีคุณสมบัติอะไรบ้าง ...

ค้นหาจากหนังสือความฝันออนไลน์ว่าทำไม Apples ถึงฝันโดยอ่านคำตอบด้านล่างตามที่ผู้แปลตีความ ...

ฉันเห็นด้วยกับคำตอบของ Nikita Galayko ด้านบน! ฉันถามคำถามนี้ที่โรงเรียน ในหนังสือเล่มหนึ่งเกี่ยวกับ...